
SLIDE 1
The Central Curve in Linear Programming
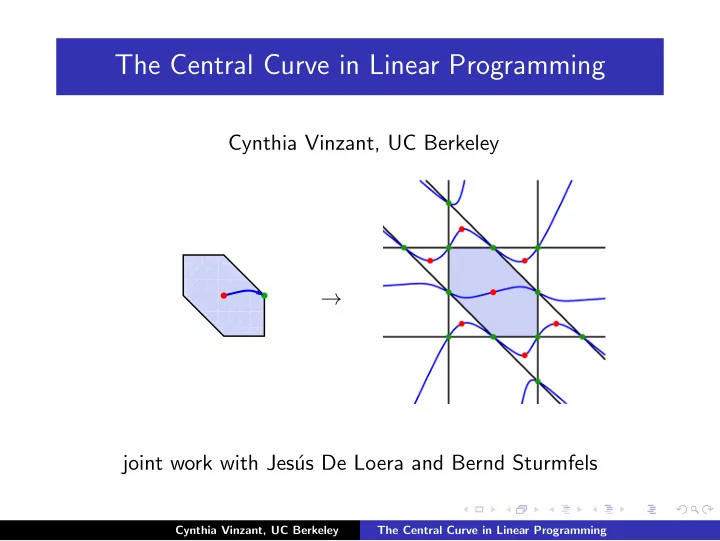
Cynthia Vinzant, UC Berkeley → joint work with Jes´ us De Loera and Bernd Sturmfels
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
The Central Curve in Linear Programming Cynthia Vinzant, UC Berkeley - - PowerPoint PPT Presentation
The Central Curve in Linear Programming Cynthia Vinzant, UC Berkeley joint work with Jes us De Loera and Bernd Sturmfels Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming The Central Path of a Linear Program Linear
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
c
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
c
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
c
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
a b b a c c f e d e e f d f d b c a
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
a b b a c c f e d e e f d f d b c a
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
a b b a c c f e d e e f d f d b c a
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
a b b a c c f e d e e f d f d b c a
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming
a b b a c c f e d e e f d f d b c a
Cynthia Vinzant, UC Berkeley The Central Curve in Linear Programming