
SLIDE 1
VIEWING OUTLINE Positioning a Camera Projections Orthogonal - - PowerPoint PPT Presentation
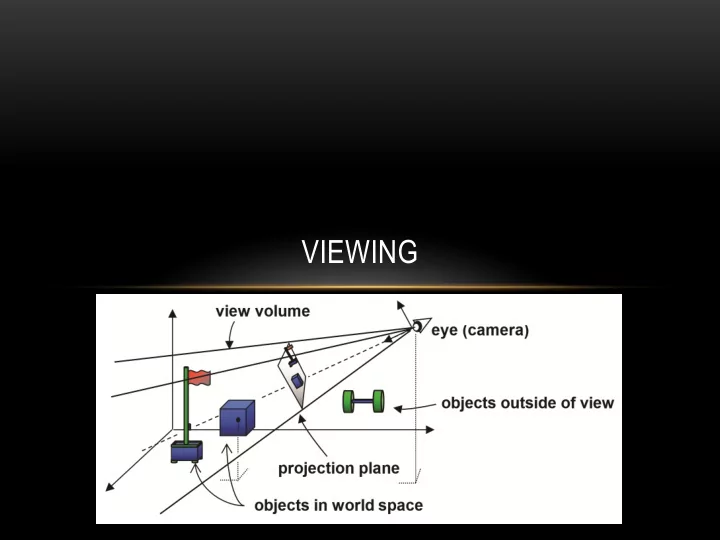
VIEWING OUTLINE Positioning a Camera Projections Orthogonal Perspective COMPUTER VIEWING There are three aspects of the viewing process, all of which are implemented in the pipeline, Positioning the camera
3
pipeline,
4
5
6
7
private Matrix 3D lookAt(Point3D eye, Point3D target, Vector 3D y) { Vector3d eyeV = new Vector3D(eye); Vector3D targetV = new Vector3D(target); Vector3d fwd = (targetV.minus(eyeV).normalize(); Vector3D side = (fwd.cross(y).normalize(); Vector3d up = (side.cross(fwd).normalize(); …
… Matrix3D look = new Matrix3D(); look.setElementAt(0, 0, side.getX()); look.setElementAt(1, 0, up.getX); look.setElementAt(2, 0, -fwd.getX()); look.setElementAt(3, 0, 0.0f); look.setElementAt(0, 1, side.getY()); look.setElementAt(1, 1, up.getY()); look.setElementAt(2, 1, -fwd.getY()); look.setElementAt(3, 1, 0.0f); look.setElementAt(0, 2, side.getZ()); look.setElementAt(1, 2, up.getZ()); look.setElementAt(2, 2, -fwd.getZ()); look.setElementAt(3, 2, 0.0f); look.setElementAt(0, 3, side.dot(eyeV.mult(-1))); look.setElementAt(1, 3, up.dot(eyeV.mult(-1))); look.setElementAt(2, 3, (fwd.mult(-1).dot(eveV.mult(-1))); look.setElementAt(3, 3, 1.0f); return(look); }
12
13
14
– More natural, simulates what our eyes or a camera sees
to “eye” or COP). – Used in engineering and architecture for measurement purposes
principal axes of object (relative angle and position), and what angle the projectors make with the projection plane
1 5
16
near and far measured from camera
17
18
19
21
22
– engineering drawings of machines, machine parts – working architectural drawings
– accurate measurement possible – all views are at same scale
– does not provide “realistic” view or sense of 3D form
three-dimensional feeling for object
23
24
25
26
27
principal axes
appearance
Construction of an isometric projection: projection plane cuts each principal axis by 45°
28
multiview orthographic cavalier cabinet
30
isometric projection for ages.
Zaxxon which were made possible by advances in raster graphics hardware
see things in distance as well as things close up (e.g. strategy, simulation games)
31
1 2 2 2 near far near far far near bottom top bottom top bottom top left right left right left right
33
Projectors coverge at center of projection
34
where object intersects projection plane)
converge
If we were viewing this scene using parallel projection, the tracks would not converge
35
36
z coordinate axes, number of vanishing points = number of principal coordinate axes intersected by projection plane
Three Point Perspective (z, x, and y-axis vanishing points) Two Point Perspective (z, and x-axis vanishing points) One Point Perspective (z-axis vanishing point)
z
37
38
39
40
– Looks realistic
44
45
projection transformations
46