
SLIDE 1
EDA222/DIT160 – Real-Time Systems, Chalmers/GU, 2008/2009 Lecture #14 Updated 2009-03-01
Real Real-
- Time Systems
Time Systems
Verification Implementation Specification
- Dynamic scheduling
- - Earliest-deadline-first
scheduling
- Processor-demand analysis
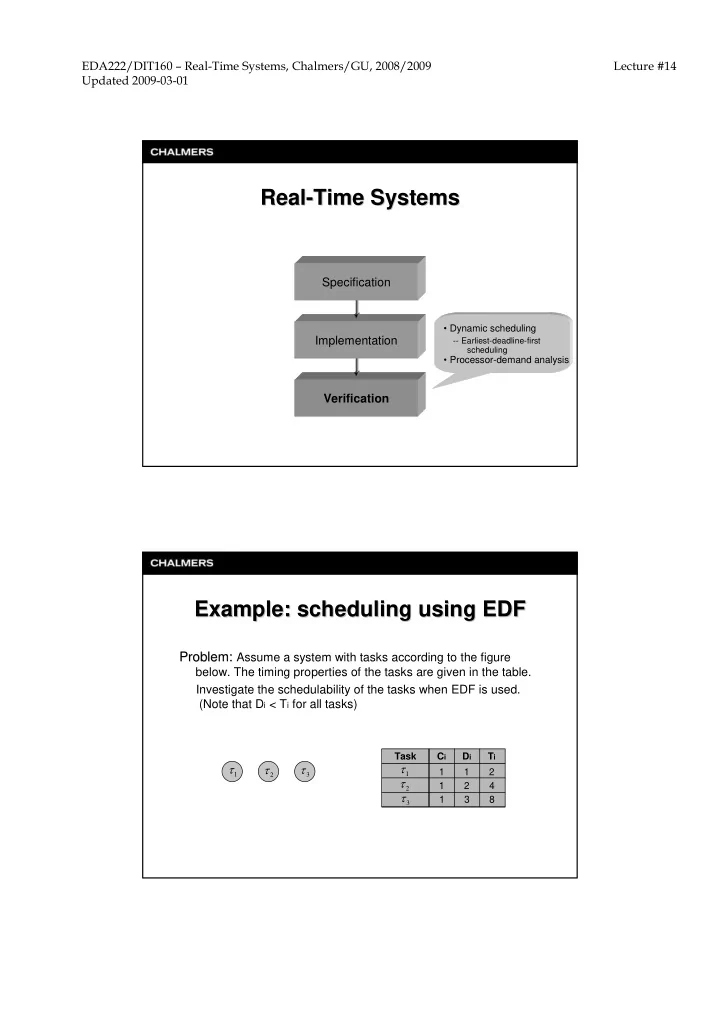
Example: scheduling using EDF Example: scheduling using EDF
Problem: Problem: Assume a system with tasks according to the figure
- below. The timing properties of the tasks are given in the table.
Investigate the schedulability of the tasks when EDF is used. (Note that Di < Ti for all tasks)
1
τ
2
τ
3
τ
Task Ci Di Ti 1
1
τ
2
τ
3
τ
1 1 1 2 3 2 4 8