
SLIDE 1
EDA222/DIT160 – Real-Time Systems, Chalmers/GU, 2008/2009 Lecture #10
Updated 2009-02-15
1
Real Real-
- Time Systems
Time Systems
Verification Implementation Specification
- Task model
- Execution-time analysis
Designing a real Designing a real-
- time system
time system
Verification Implementation Specification
How should it be done? What should be done & When should it be done? Can it be done with the given implementation? New design!
- Task model
- Schedulability test
- Logical function
- Temporal function
- System model
Task model Task model
task body P1 is Interval : constant Duration := 5.0; Next_Time : Time; begin Next_Time := Clock + Interval; loop Action; delay until Next_Time; Next_Time := Next_Time + Interval; end loop; end P1; task body P2 is Interval : constant Duration := 7.0; Next_Time : Time; begin Next_Time := Clock + Interval; loop Action; delay until Next_Time; Next_Time := Next_Time + Interval; end loop; end P2;
Implementation Implementation Abstract model Abstract model
1
τ
2
τ
{ }
1 1 1 1 1
, , , C T D O τ =
{ }
2 2 2 2 2
, , , C T D O τ =
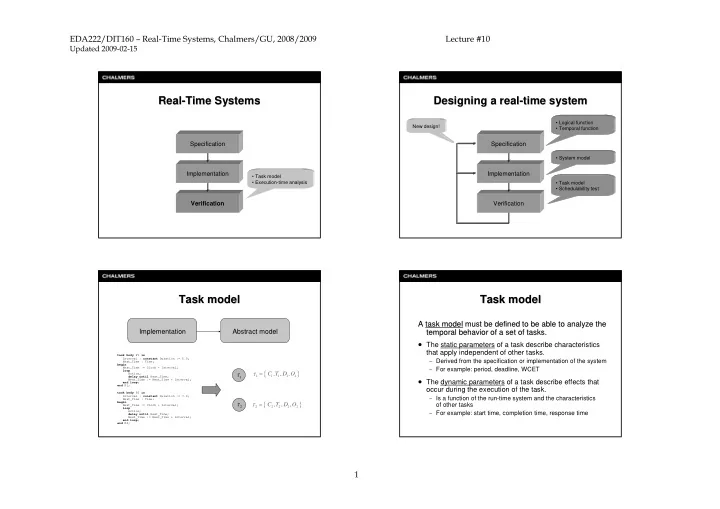
Task model Task model
A A task model task model must be defined to be able to analyze the must be defined to be able to analyze the temporal behavior of a set of tasks. temporal behavior of a set of tasks.
- The static parameters of a task describe characteristics
that apply independent of other tasks.
– Derived from the specification or implementation of the system – For example: period, deadline, WCET
- The dynamic parameters of a task describe effects that
- ccur during the execution of the task.
– Is a function of the run-time system and the characteristics
- f other tasks