
SLIDE 1
EDA222/DIT160 – Real-Time Systems, Chalmers/GU, 2008/2009 Lecture #13
Updated 2009-02-24
1
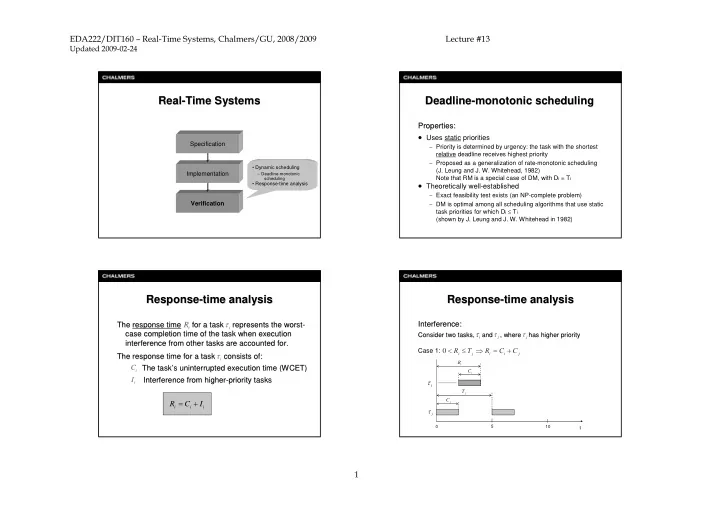
Real Real-
- Time Systems
Time Systems
Verification Implementation Specification
- Dynamic scheduling
- - Deadline-monotonic
scheduling
- Response-time analysis
Deadline Deadline-
- monotonic scheduling
monotonic scheduling
Properties: Properties:
- Uses static priorities
– Priority is determined by urgency: the task with the shortest relative deadline receives highest priority – Proposed as a generalization of rate-monotonic scheduling (J. Leung and J. W. Whitehead, 1982) Note that RM is a special case of DM, with Di = Ti
- Theoretically well-established
– Exact feasibility test exists (an NP-complete problem) – DM is optimal among all scheduling algorithms that use static task priorities for which Di ≤ Ti (shown by J. Leung and J. W. Whitehead in 1982)
Response Response-
- time analysis
time analysis
The The response time response time for a task represents the worst for a task represents the worst-
- case completion time of the task when execution
case completion time of the task when execution interference from other tasks are accounted for. interference from other tasks are accounted for.
i
R
i i i
I C R + =
i
τ
The response time for a task consists of: The response time for a task consists of: The task The task’ ’s uninterrupted execution time (WCET) s uninterrupted execution time (WCET) Interference from higher Interference from higher-
- priority tasks
priority tasks
i
C
i
τ
i
I
Response Response-
- time analysis
time analysis
Interference: Interference:
Consider two tasks, and , where has higher priority Consider two tasks, and , where has higher priority
i
τ
j
τ
j
τ Case 1:
j i i j i
C C R T R + = ⇒ ≤ <
t
5 10
j
T
i
R
j
C
i
C
i
τ
j