
SLIDE 1
Definition and Evaluation of Projected Hessians for Piggyback Optimization
Andreas Griewank, Nicolas Gauger, Jan Riehme Humboldt-Universit¨ at zu Berlin AD Workshop 2005, Nice, April 16
- First •Prev •Next •Last •Full Screen •Close •Quit
AD Workshop 2005, Nice, April 16 1 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin
Table of Content
- General Scenario for Optimal Design
- Single-step-one-shot = Piggy Back Optimization
- Time-lagged derivative convergence for fixed u
- Spectral analysis of single-step iteration
- Numerical Result on Modified Bratu Example
- Software and Implementation Issues on CFD Code
- First •Prev •Next •Last •Full Screen •Close •Quit
AD Workshop 2005, Nice, April 16 2 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin
Optimal Design Scenario
- Problem:
Min f(y, u) s.t. c(y, u) = 0 where y ∈ Rm and u ∈ Rn are state and design variables
- Available:
Code for f(y, u) and G(y, u) ≈ y −
- ∂
∂yc(y, u)
−1 c(y, u)
- Assumption:
G, f ∈ C2,1(Rn+m) and ∂
∂yG(y, u) ≤ ρ < 1
- Notation:
N(¯ y, y, u) ≡ f(y, u) + ¯ y G(y, u) ≡ Lagrangian + ¯ yy, where the Lagrangian is formed w.r.t. c(y, u) ≡ G(y, u) − y = 0.
- First •Prev •Next •Last •Full Screen •Close •Quit
AD Workshop 2005, Nice, April 16 3 Andreas Griewank, Nicolas Gauger, Jan Riehme, HU Berlin
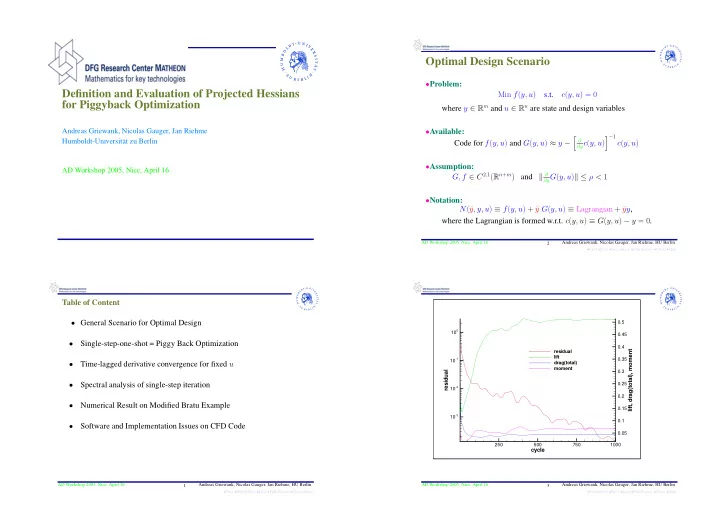
cycle residual lift, drag(total), moment
250 500 750 1000 10
- 3
10
- 2
10
- 1
10 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 residual lift drag(total) moment