
SLIDE 1
(a) Blank tile (b) Last tile moved (c) 1 4 1 4 2 7 7 8 5 2 3 3 8 5 1 6 3 6 6 8 6 3 2 5 8 7 6 3 4 5 8 7 4 1 2 4 1 7 6 5 2 5 7 4 8 1 7 6 3 2 5 4 4 8 1 5 7 6 3 2 2 2 4 8 1 5 7 6 3 2 3 4 8 1 5 6 7 3 2 3 4 8 1 5 7 6 8 1 up up left left down down left up up
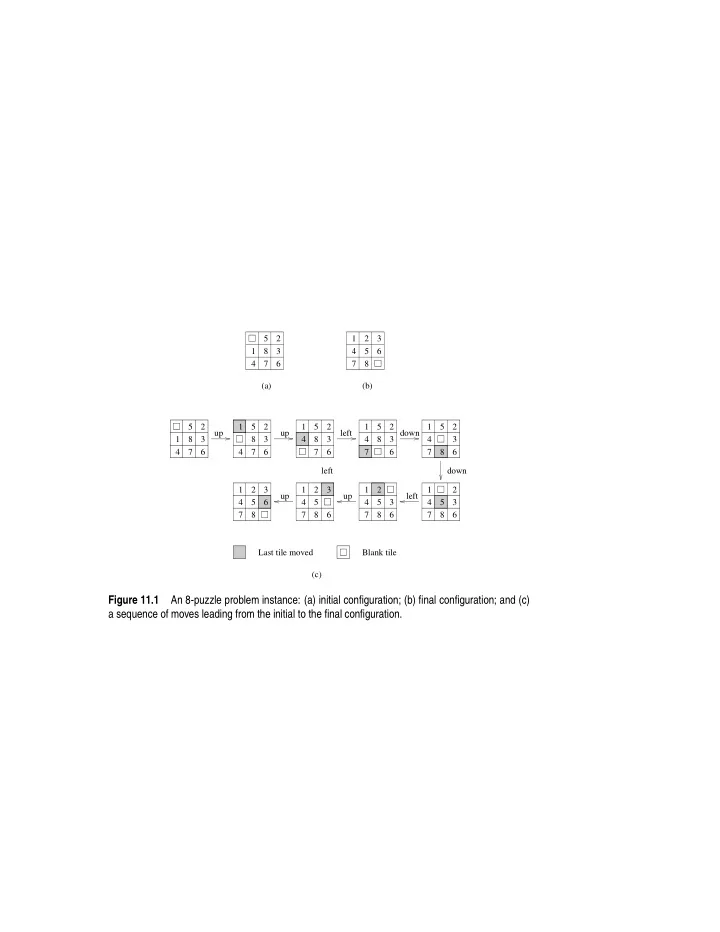
Figure 11.1 An 8-puzzle problem instance: (a) initial configuration; (b) final configuration; and (c) a sequence of moves leading from the initial to the final configuration.