
SLIDE 1
18/01/2011 1
ELE 882: Introduction to Digital Image Processing (DIP) 2 Lecture Notes 2:
Digital Image Fundamentals and Image Acquisition
1/18/2011 1
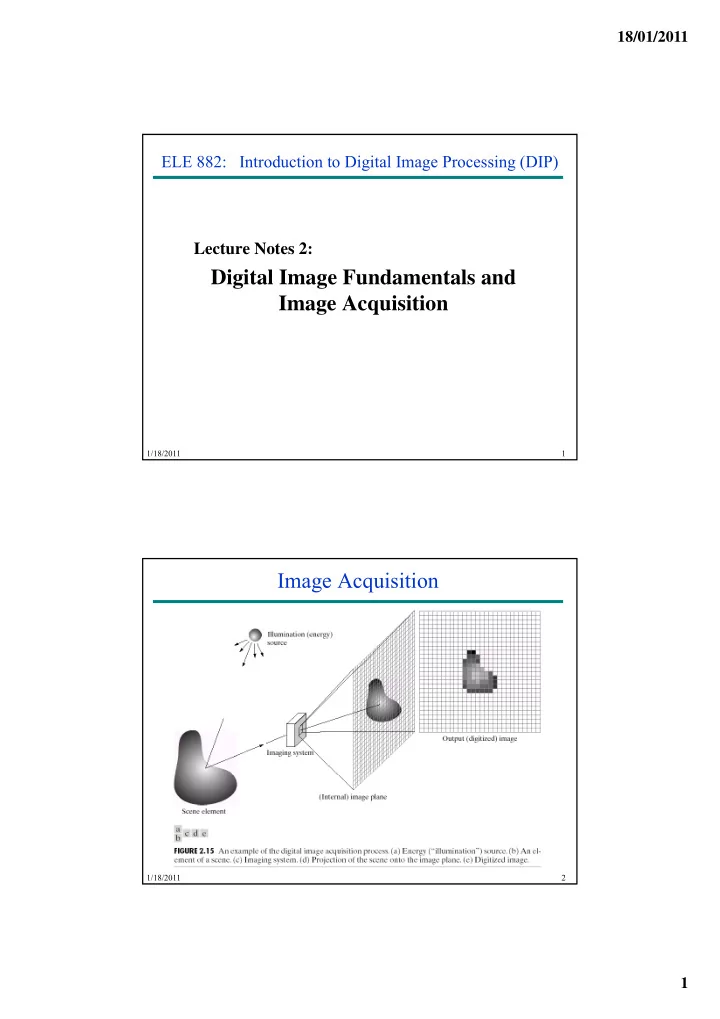
Image Acquisition
1/18/2011 2
Digital Image Fundamentals and Image Acquisition 1/18/2011 1 - - PDF document
18/01/2011 ELE 882: Introduction to Digital Image Processing (DIP) Lecture Notes 2: 2 Digital Image Fundamentals and Image Acquisition 1/18/2011 1 Image Acquisition 1/18/2011 2 1 18/01/2011 Image description f ( x , y ) :
1/18/2011 1
1/18/2011 2
1/18/2011 3
1/18/2011 4
1/18/2011 5 1/18/2011 6
1/18/2011 7
) 1 , 1 ( . . . ) 1 , 1 ( ) , 1 ( . . . . . . . . . . . . . . . . . . ) 1 , 1 ( . . . ) 1 , 1 ( ) , 1 ( ) 1 , ( . . . ) 1 , ( ) , ( N M f M f M f N f f f N f f f
1/18/2011 8
1/18/2011 9
1/18/2011 10
1/18/2011 11
1/18/2011 12
1/18/2011 13
1/18/2011 14
1/18/2011 15
1/18/2011 16
1/18/2011 17
1/18/2011 18
1/18/2011 19
1/18/2011 20
1/18/2011 21
1/18/2011 22
1/18/2011 23
1/18/2011 24
1/18/2011 25
1/18/2011 26
1/18/2011 27
1/18/2011 28
1/18/2011 29
1/18/2011 30
1/18/2011 31
1/18/2011 32
1/18/2011 33
2 2
4 1/18/2011 34
8
1/18/2011 35