
SLIDE 1
Image Analysis
Image Restoration and Reconstruction Niclas Börlin niclas.borlin@cs.umu.se
Department of Computing Science Umeå University
February 3, 2009
Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 1 / 31
Image Restoration
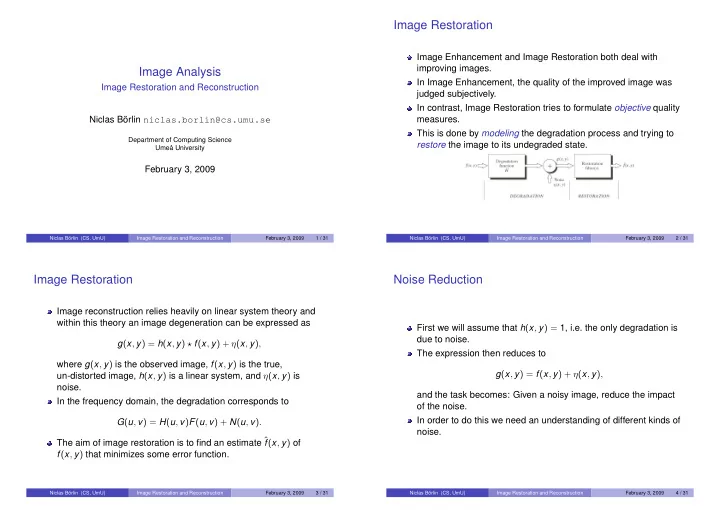
Image Enhancement and Image Restoration both deal with improving images. In Image Enhancement, the quality of the improved image was judged subjectively. In contrast, Image Restoration tries to formulate objective quality measures. This is done by modeling the degradation process and trying to restore the image to its undegraded state.
Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 2 / 31
Image Restoration
Image reconstruction relies heavily on linear system theory and within this theory an image degeneration can be expressed as g(x, y) = h(x, y) ⋆ f(x, y) + η(x, y), where g(x, y) is the observed image, f(x, y) is the true, un-distorted image, h(x, y) is a linear system, and η(x, y) is noise. In the frequency domain, the degradation corresponds to G(u, v) = H(u, v)F(u, v) + N(u, v). The aim of image restoration is to find an estimate ˆ f(x, y) of f(x, y) that minimizes some error function.
Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 3 / 31
Noise Reduction
First we will assume that h(x, y) = 1, i.e. the only degradation is due to noise. The expression then reduces to g(x, y) = f(x, y) + η(x, y), and the task becomes: Given a noisy image, reduce the impact
- f the noise.
In order to do this we need an understanding of different kinds of noise.
Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 4 / 31