
SLIDE 1
Differential Equations
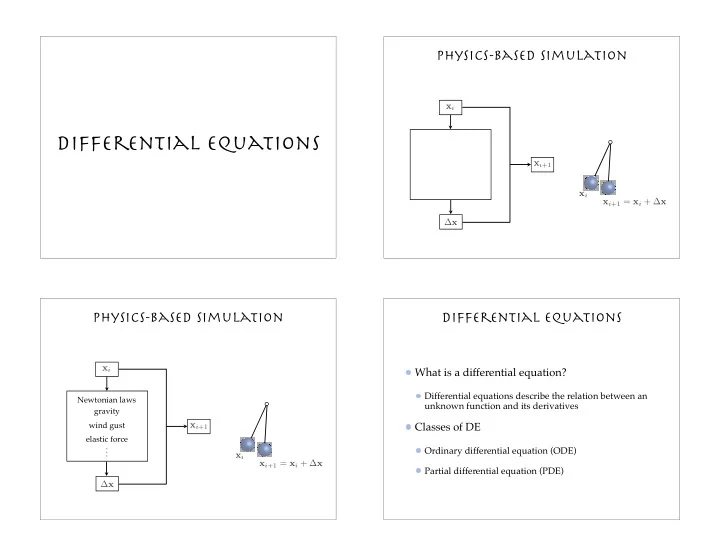
Physics-based simulation
xi ∆x xi+1 xi+1 = xi + ∆x xi
Physics-based simulation
xi ∆x xi+1 xi xi+1 = xi + ∆x
Newtonian laws gravity wind gust elastic force
. . .
Differential equations
What is a differential equation?
Differential equations describe the relation between an unknown function and its derivatives
Classes of DE
Ordinary differential equation (ODE) Partial differential equation (PDE)