
SLIDE 1
Camera Model CS 4495 Computer Vision – A. Bobick
CS 4495 Computer Vision Camera Model Aaron Bobick School of - - PowerPoint PPT Presentation
Camera Model CS 4495 Computer Vision A. Bobick CS 4495 Computer Vision Camera Model Aaron Bobick School of Interactive Computing Camera Model CS 4495 Computer Vision A. Bobick Administrivia Problem set 1: How did it go?
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
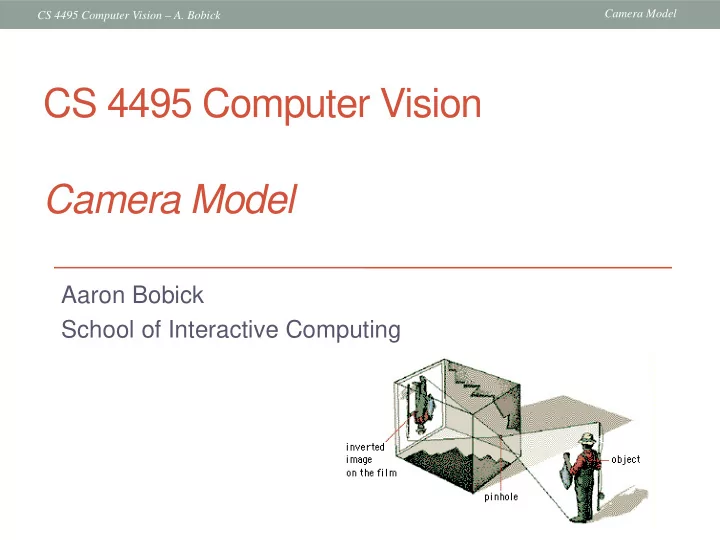
Figure from US Navy Manual of Basic Optics and Optical Instruments, prepared by Bureau of Naval Personnel. Reprinted by Dover Publications, Inc., 1969.
Camera Model CS 4495 Computer Vision – A. Bobick
Heliograph- a pewter plate coated with bitumen of Judea (an asphalt derivative of petroleum); after at least a day-long exposure of eight hours, the plate was removed and the latent image of the view from the window was rendered visible by washing it with a mixture of oil of lavender and white petroleum which dissolved away the parts of the bitumen which had not been hardened by light. – Harry Ransom Center UT Austin Reproduction, 1952 View from the Window at le Gras, Joseph Nicéphore Niépce 1826
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
penetrate through a small hole into a very dark room ... you will see [on the opposite wall] these objects in their proper form and color, reduced in size, in a reversed position, owing to the intersection of the rays".
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
“circle of confusion”
Camera Model CS 4495 Computer Vision – A. Bobick
many “aspherical” elements – designed to improve variety of “aberrations”…
Camera Model CS 4495 Computer Vision – A. Bobick
Slide by Steve Seitz
Camera Model CS 4495 Computer Vision – A. Bobick
Computer Vision - A Modern Approach Set: Cameras Slides by D.A. Forsyth
Camera Model CS 4495 Computer Vision – A. Bobick
Computer Vision - A Modern Approach Set: Cameras Slides by D.A. Forsyth
Camera Model CS 4495 Computer Vision – A. Bobick
Computer Vision - A Modern Approach Set: Cameras Slides by D.A. Forsyth
Camera Model CS 4495 Computer Vision – A. Bobick
“circle of confusion”
Camera Model CS 4495 Computer Vision – A. Bobick
Ren Ng
Camera Model CS 4495 Computer Vision – A. Bobick
Flower images from Wikipedia http://en.wikipedia.org/wiki/Depth_of_field
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
An Actual Slide by Jim Rehg
Camera Model CS 4495 Computer Vision – A. Bobick
From Zisserman & Hartley
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
No distortion Pin cushion Barrel
Camera Model CS 4495 Computer Vision – A. Bobick
Apply radial distortion Apply focal length translate image center Assume project to “normalized” image coordinates
Camera Model CS 4495 Computer Vision – A. Bobick
from Helmut Dersch
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
handed-coordinates
Camera Model CS 4495 Computer Vision – A. Bobick
Perspective Projection of ray from (x,y,z) to COP
throwing out the last coordinate:
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
Camera Model CS 4495 Computer Vision – A. Bobick
VPL VPR H VP1 VP2 VP3
Camera Model CS 4495 Computer Vision – A. Bobick
http://www.michaelbach.de/ot/sze_muelue/index.html
Which line is longer?
Camera Model CS 4495 Computer Vision – A. Bobick
) , ( ) , , ( y x z y x →
Camera Model CS 4495 Computer Vision – A. Bobick
Image World
Camera Model CS 4495 Computer Vision – A. Bobick
→ , ) , , ( z fy z fx z y x
Camera Model CS 4495 Computer Vision – A. Bobick