SLIDE 1
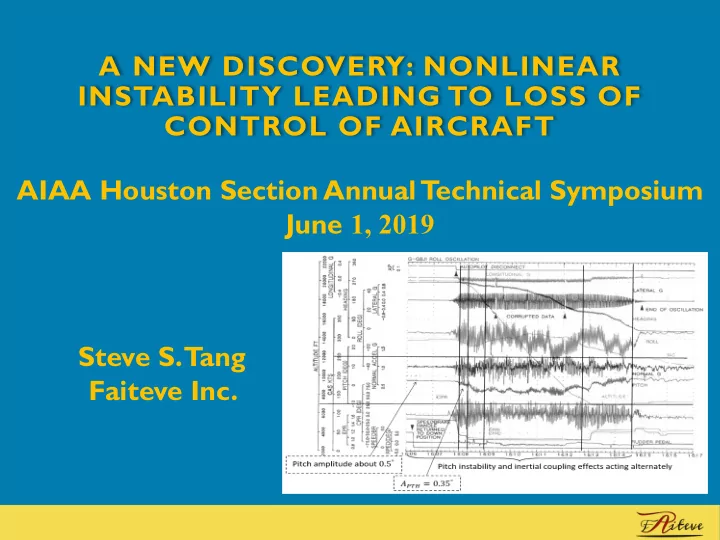
A NEW DISCOVERY: NONLINEAR INSTABILITY LEADING TO LOSS OF CONTROL OF AIRCRAFT AIAA Houston Section Annual T echnical Symposium June 1, 2019 Steve S. Tang Faiteve Inc.
SLIDE 2
§ The original governing equations for aircraft roll (𝜒), pitch (𝜄), and yaw (𝜔) in the principal axis frame (𝐽& < 𝐽( < 𝐽)): 𝐽& ̈ 𝜒 + 𝑐- ̇ 𝜒 + 𝑙-𝜒 = 𝐽( − 𝐽) ̇ 𝜄 ̇ 𝜔 + 𝑁3(𝑢) 𝐽( ̈ 𝜄 + 𝑐6 ̇ 𝜄 + 𝑙6𝜄 = 𝐽) − 𝐽& ̇ 𝜒 ̇ 𝜔 + 𝑁7 𝑢 𝐽) ̈ 𝜔 + 𝑐8 ̇ 𝜔 + 𝑙8𝜔 = 𝐽& − 𝐽( ̇ 𝜒 ̇ 𝜄 + 𝑁9 𝑢 § The linearized equations: 𝐽3 ̈ 𝜒 + 𝑐- ̇ 𝜒 + 𝑙-𝜒 = 𝑁3(𝑢) 𝐽7 ̈ 𝜄 + 𝑐6 ̇ 𝜄 + 𝑙6𝜄 = 𝑁7 𝑢 𝐽9 ̈ 𝜔 + 𝑐8 ̇ 𝜔 + 𝑙8𝜔 = 𝑁9 𝑢 § 𝐽7 − 𝐽9 ̇ 𝜄 ̇ 𝜔, 𝐽9 − 𝐽3 ̇ 𝜒 ̇ 𝜔, 𝐽3 − 𝐽7 ̇ 𝜒 ̇ 𝜄 - the inertial moments, similar to Coriolis force for hurricanes, should not be neglected
Neglected elephants in the equations
SLIDE 3
§ As nonlinear harmonic oscillation system: 𝐽3 ̈ 𝜒 + 𝑐- ̇ 𝜒 + 𝑙-𝜒 = 𝐽7 − 𝐽9 ̇ 𝜄 ̇ 𝜔 + 𝑁3(𝑢) 𝐽7 ̈ 𝜄 + 𝑐6 ̇ 𝜄 + 𝑙6𝜄 = 𝐽9 − 𝐽3 ̇ 𝜒 ̇ 𝜔 + 𝑁7 𝑢 𝐽9 ̈ 𝜔 + 𝑐8 ̇ 𝜔 + 𝑙8𝜔 = 𝐽3 − 𝐽7 ̇ 𝜒 ̇ 𝜄 + 𝑁9 𝑢
The elephants causing resonances
What matters the most is the exciting frequencies of these terms, not the amplitudes
SLIDE 4
§The most common maneuver in takeoff, cruise leveling and landing approach §The original governing equations: 𝐽3 ̈ 𝜒 + 𝑐- ̇ 𝜒 + 𝑙-𝜒 = 𝐽7 − 𝐽9 ̇ 𝜄 ̇ 𝜔 𝐽7 ̈ 𝜄 + 𝑐6 ̇ 𝜄 + 𝑙6𝜄 = 𝐽9 − 𝐽3 ̇ 𝜒 ̇ 𝜔 + 𝑁6-𝑑𝑝𝑡(𝜕6-𝑢 + 𝛽6-) 𝐽9 ̈ 𝜔 + 𝑐8 ̇ 𝜔 + 𝑙8𝜔 = 𝐽3 − 𝐽7 ̇ 𝜒 ̇ 𝜄 §The current longitudinal dynamics (pitch control only): 𝐽7 ̈ 𝜄 + 𝑐6 ̇ 𝜄 + 𝑙6𝜄 = 𝑁6-𝑑𝑝𝑡(𝜕6-𝑢 + 𝛽6-)
A pitch control case
SLIDE 5 § By the current practice, the aircraft response is (caterpillar mode)
𝜒 = 0 𝜄 = 𝜄@(𝑁6-) cos 𝜕6-𝑢 + 𝛽6- + 𝜊6- 𝜔 = 0 § This pitch-only response is not always stable. Under certain conditions, the following roll, pitch and yaw bifurcation solutions (butterfly mode) exist. 𝜒 𝑢 = ∑FG-
H 𝜒F 𝑢 = ∑FG- H 𝐵-F cos 𝜕-F𝑢 + 𝛾-F
𝜄 𝑢 = ∑KG-
H 𝜄 K 𝑢 = ∑KG- H 𝐵6K cos 𝜕6K𝑢 + 𝛾6K
𝜔 𝑢 = ∑LG-
H 𝜔L 𝑢 = ∑LG- H 𝐵8L cos 𝜕8L𝑢 + 𝛾8L
Solutions and bifurcations
SLIDE 6 § Solve the amplitudes:
𝐵-- = 2 𝜕-- 𝐽7𝐽9𝑎6-𝑎8- (𝐽9 − 𝐽3)(𝐽7 − 𝐽3) 𝑁6- 2𝐽7𝑎6- 𝐽9 − 𝐽7 𝐽7 − 𝐽3 𝐽3𝐽9𝑎--𝑎8-
− 1
𝐵6-= 2 𝜕6- 𝐽3𝐽9𝑎--𝑎8- (𝐽9 − 𝐽7)(𝐽7 − 𝐽3)
𝐵8- = 2 𝜕8- 𝐽3𝐽7𝑎6-𝑎-- (𝐽9 − 𝐽7)(𝐽9 − 𝐽3) 𝑁6- 2𝐽7𝑎6- 𝐽9 − 𝐽7 𝐽7 − 𝐽3 𝐽3𝐽9𝑎--𝑎8-
− 1
Roll impedance: 𝑎-- = (𝜕--
6 − 𝜕-@ 6 )6+( QRSRR TU
)6 /𝜕-- Yaw impedance: 𝑎8- = (𝜕8-
6 − 𝜕8@ 6 )6+( QVSVR TW
)6/𝜕8-
Amplitudes of the 1st modes
Pitch amplitude cutoff from 𝑁6- Pitch moment 𝑁6- driving roll and yaw
SLIDE 7 § Pitch unstable if 𝑁6- > 2𝐽7𝑎6-
TUTWYRRYVR (TWZT[)(T[ZTU)
, pitch moment threshold Pitch amplitude > 𝐵\]^ ≡
6 S`R TUTWYRRYVR (TWZT[)(T[ZTU)
, pitch threshold § Pitch stable if
𝑁6- ≤ 2𝐽7𝑎6-
TUTWYRRYVR (TWZT[)(T[ZTU)
§ Proved in the book, if the first modes 𝜒-, 𝜄-, 𝜔- exist, 𝜒6, 𝜄6, 𝜔6; 𝜒8, 𝜄8, 𝜔8, … exist.
Pitch conditional instability criterion
SLIDE 8 § A commercial aircraft model
was used to do the numerical simulations. § Pitch instability threshold in Scenario 1 § Pitch instability threshold in Scenario 2
Pitch instability threshold verification
Pitch frequency (rad/s) Pitch threshold (deg)
4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10 20 30 40 50 60 70 80 Analytical Numerical
Pitch frequency (rad/s) Pitch threshold (deg)
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 20 40 60 80 100 120 Analytical Numerical
Scenario 1 Scenario 2 The worst case: 𝜕6- = 𝜕-@ + 𝜕8@ The worst case: 𝜕6- = 𝜕-@ − 𝜕8@
SLIDE 9 § The pitch critical frequency:
§ Pitch amplitude threshold § Two dangerous situations,
Roll damping; 𝑐- → 0, then 𝐵\]^ → 0
- 2. Yaw damper malfunction, turned off or hardover
Yaw damping: 𝑐8 → 0, then 𝐵\]^ → 0
The worst case – a resonance mode
𝐵\]^ ≡ 2 𝜕-@ + 𝜕8@ 𝑐-𝑐8 (𝐽9 − 𝐽7)(𝐽7 − 𝐽3)
𝜕6- = 𝜕efFgFehL ≡ 𝜕-@ + 𝜕8@
SLIDE 10 § At the pitch
critical frequency 𝜕efFgFehL, aircraft is prone to nonlinear pitch instability before stall during takeoff
The danger during takeoff
caterpillar sketch
SLIDE 11 § A pitch control producing
18° pitch oscillation at 𝜕6- = 5.2 (𝑆𝑏𝑒/𝑡) §The pitch amplitude threshold: 𝐵\]^ = 12° § Pitch unstable: pitch 18° > 𝐵\]^ = 12° §The final steady state amplitudes depend on the external pitch control amplitude
Loss of control of aircraft
Time (sec) Roll (deg) 20 40 60 80 100
40 80 Time (sec) Pitch (deg) 20 40 60 80 100
25 50 Time (sec) Yaw (deg) 20 40 60 80 100
25 50
“Uncommanded” roll 55° “Uncommanded” pitch 37° “Uncommanded” yaw 36°
SLIDE 12 Nonlinear pitch instability leading to Loss of control of aircraft on B737-236 Advanced G-BGJI
B737-236 mode change from caterpillar to butterfly happened 1.5 min before autopilot disconnect
SLIDE 13 Nonlinear pitch instability leading to Loss of control
- f aircraft on Ethiopian Airline Flight 302 B737 Max
Pitch ≈ 18° > Boeing recommended pitch 15−16° Uncommanded roll began 4 seconds earlier AOA ≈ 15°, critical AOA → 𝑐- → 0, 𝐵\]^ → 0, 𝒒𝒋𝒖𝒅𝒊 𝒐𝒑𝒐𝒎𝒋𝒐𝒇𝒃𝒔𝒎𝒛 𝒗𝒐𝒕𝒖𝒃𝒄𝒎𝒇 Stick shaker began 4 seconds later
Flight 302 bifurcated from caterpillar to butterfly mode 4 seconds before stick shaker activated
SLIDE 14
§ Northwest Flight 255 MD DC-9-82 crashed in1987
§ Delta Airlines Flight 1141 B727-232 crashed in1988 § USAir Flight 405 Fokker F-28 crashed in1992 § American Airline Flight 587 A300-605R crashed in 2001 § PT. Mandala Airlines Flight 091 B737-200 crashed in 2005 § Air Transat A310-308 C-GPAT upset in 2008 § Spainair Flight 5022 MD DC-9-82 crashed in 2008 § Gulfstream GVI (G650) N652GD test flight crashed in 2011 § Ethiopian Airlines Flight 302 B737 Max crashed in 2019
The list of nonlinear pitch instability leading to loss of control of aircraft during takeoff
SLIDE 15 § Aircraft model with restoring and damping for roll and yaw
𝜕-@ = 2𝜌, 𝑈
𝜕8@ = 𝜌, 𝑈8@ = 2 𝑡𝑓𝑑
§ The dangerous pitch frequencies
Scenario 1: 𝜕6- = 𝜕-@ + 𝜕8@ = 3𝜌 𝑈6- = 0. 7𝑡, 𝐵\]^Z- = 6
8‰ QRQV (TWZT[)(T[ZTU)
= 𝐵\]^Z6/3 Scenario 2: 𝜕6- = 𝜕-@ − 𝜕8@ = 𝜌 𝑈6- = 2 𝑡, 𝐵\]^Z6 = 2 𝜌 𝑐-𝑐8 (𝐽9 − 𝐽7)(𝐽7 − 𝐽3)
§ Experimental observation: 𝐵\]^Z6 = 3𝐵\]^Z-
Nonlinear pitch instability demonstration
(www.youtube.com/watch?v=gG2-mu6I11A)