
SLIDE 1
25
2 4 3 2
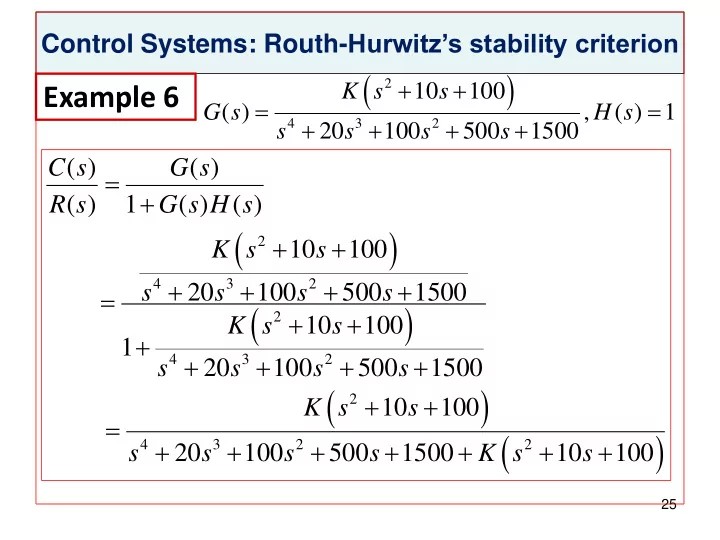
10 100 ( ) , ( ) 1 20 100 500 1500 K s s G s H s s s s s
2 4 3 2 2 4 3 2 2 4 3 2 2
( ) ( ) ( ) 1 ( ) ( ) 10 100 20 100 500 1500 10 100 1 20 100 500 1500 10 100 20 100 500 1500 10 100 C s G s R s G s H s K s s s s s s K s s s s s s K s s s s s s K s s Control Systems: Routh-Hurwitz’s stability criterion
Example 6