
SLIDE 1
1
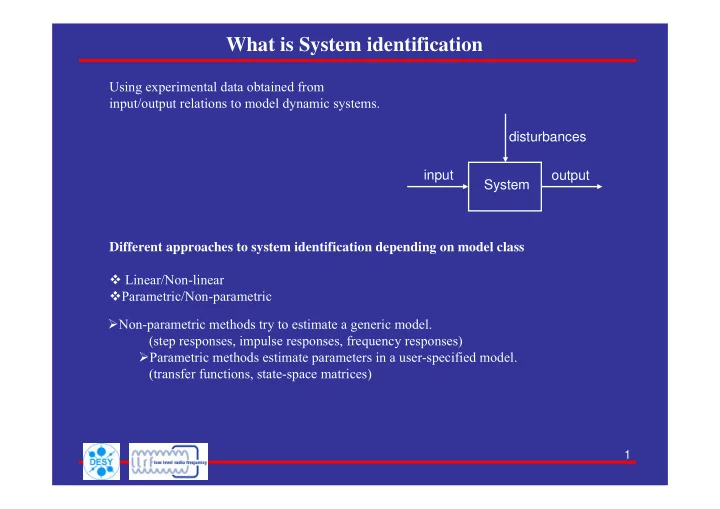
What is System identification
Using experimental data obtained from input/output relations to model dynamic systems. System
- utput
What is System identification Using experimental data obtained from - - PowerPoint PPT Presentation
What is System identification Using experimental data obtained from input/output relations to model dynamic systems. disturbances input output System Different approaches to system identification depending on model class Linear/Non-linear
1
2
3
Experimental design Data collection Data pre-filtering Model structure selection Parameter estimation Model validation Model ok? Yes No
4
5
6
7
8
System
u
Y
9
=
N 1 t
=
N 1 t
10
1 1 k − − −
1 −
11
( ) ( )
q A q B
( ) ( )
q F q B
( ) ( )
q F q B
( )
q B
e
) ( 1 q A ) ( ) ( q A q C ) ( ) ( q D q C 1 1
e
( ) ( )
q A q B
12
13
14
1 −
1 −
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
2 1 2 1 2
1
2
30
1
2
31
32
33
ω 3 j 1 ω 2 j 1 jω 1 1 + + +
0.1
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2
p
K 1 −
0.1
p
krit
34
35
n n 1 m m 1 p
) ( ≥ e e F ) ( ≥ ≥ e e F K ) ( ≥ ≥ e e F K ) ( > e e F
( ) ( )
) j ( G qj 1 > + ℜ ω ω
( ) ( )
K 1 ) j ( G qj 1 − > + ℜ ω ω
( ) ( )
K 1 ) j ( G qj 1 − > + ℜ ω ω
( ) ( )
) j ( G qj 1 ≥ + ℜ ω ω ω ≤
36
K 1 ) j ( G q ) j ( G K 1 ) J ( G ) j ( G j q ) j ( G K 1 ) j ( G j q ) i ( G K 1 ) j ( G qj 1 − > ℑ − ℜ − > ℑ − ℜ ℜ + ℜ − > ℜ + ℜ − > + ℜ ω ω ω ω ω ω ω ω ω ω ω ω ω
p p
37
10
L
38
39
40
41
42
2 2 2 1
2 2 2 1
1
2 2 1 1 1
2 2 1 1
2 2 1 1 2 2 1
43
44
45
46
0.5 0.4
0.25 0.2 0.15 0.1 0.3 0.35 0.45 0.5 1
47
2 2 1
2 1 1
1
2
48