
SLIDE 1
1
Lecture 3:
Small-Scale Shared Address Space Multiprocessors & Shared memory programming (OpenMP + POSIX threads)
2
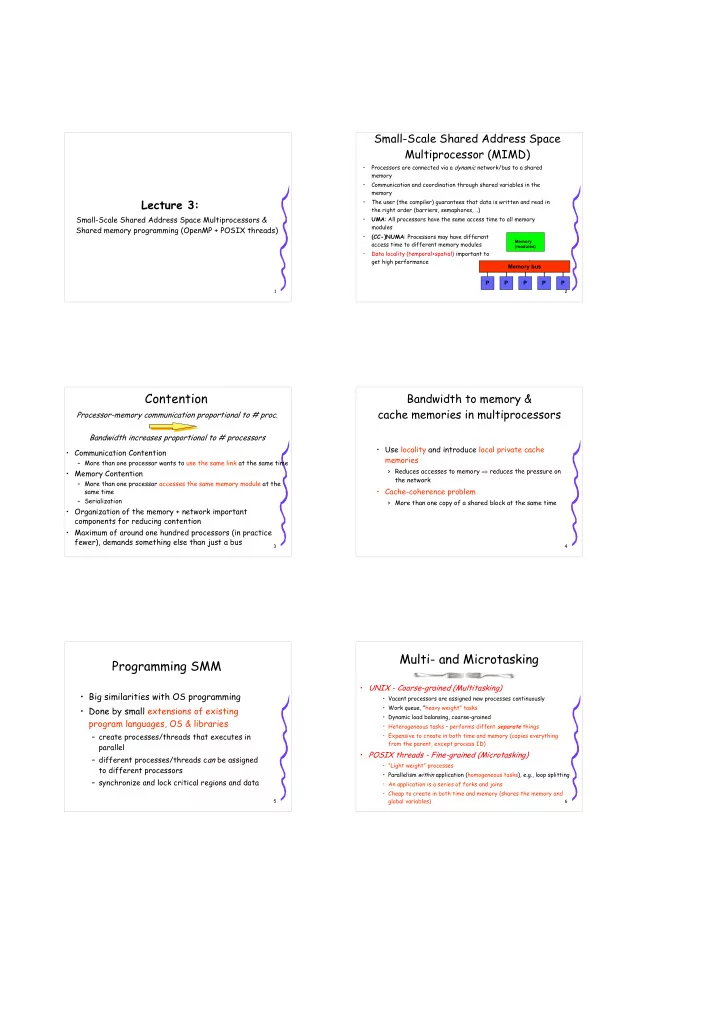
Small-Scale Shared Address Space Multiprocessor (MIMD)
- Processors are connected via a dynamic network/bus to a shared
memory
- Communication and coordination through shared variables in the
memory
- The user (the compiler) guarantees that data is written and read in
the right order (barriers, semaphores, ..)
- UMA: All processors have the same access time to all memory
modules
- (CC-)NUMA: Processors may have different
access time to different memory modules
- Data locality (temporal+spatial) important to
get high performance P P P P P
Memory (modules)
Memory bus
3
Processor-memory communication proportional to # proc. Bandwidth increases proportional to # processors
- Communication Contention
– More than one processor wants to use the same link at the same time
- Memory Contention
– More than one processor accesses the same memory module at the same time – Serialization
- Organization of the memory + network important
components for reducing contention
- Maximum of around one hundred processors (in practice
fewer), demands something else than just a bus
Contention
4
Bandwidth to memory & cache memories in multiprocessors
- Use locality and introduce local private cache
memories
> Reduces accesses to memory ⇒ reduces the pressure on the network
- Cache-coherence problem
> More than one copy of a shared block at the same time
5
Programming SMM
- Big similarities with OS programming
- Done by small extensions of existing
program languages, OS & libraries
– create processes/threads that executes in parallel – different processes/threads can be assigned to different processors – synchronize and lock critical regions and data
6
Multi- and Microtasking
- UNIX - Coarse-grained (Multitasking)
- Vacant processors are assigned new processes continuously
- Work queue, ”heavy weight” tasks
- Dynamic load balansing, coarse-grained
- Heterogeneous tasks – performs diffent separate things
- Expensive to create in both time and memory (copies everything
from the parent, except process ID)
- POSIX threads - Fine-grained (Microtasking)
- ”Light weight” processes
- Parallelism within application (homogeneous tasks), e.g., loop splitting
- An application is a series of forks and joins
- Cheap to create in both time and memory (shares the memory and
global variables)