
SLIDE 1
1
Markov Networks
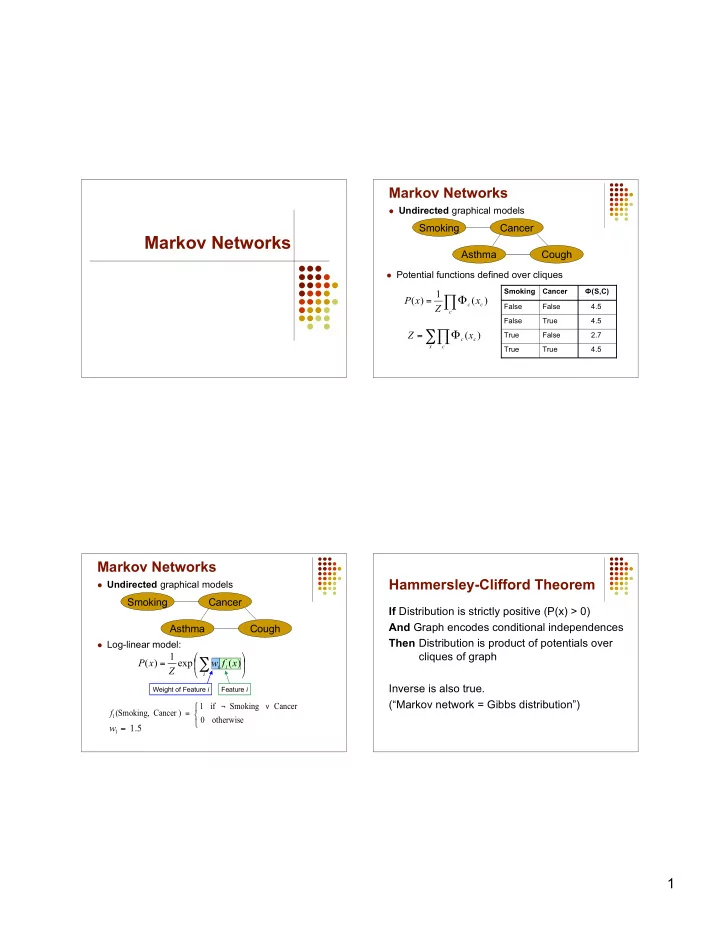
Markov Networks
Undirected graphical models
Cancer Cough Asthma Smoking
Potential functions defined over cliques 4.5 True True 2.7 False True 4.5 True False 4.5 False False Ф(S,C) Cancer Smoking
- =
c c c x
Z x P ) ( 1 ) (
- =
x c c c x
Z ) (
Markov Networks
Undirected graphical models Log-linear model: Weight of Feature i Feature i
- ¬
=
- therwise
Cancer Smoking if 1 ) Cancer Smoking, (
1
f
5 . 1
1 =
w
Cancer Cough Asthma Smoking
- =
- i
i i