
SLIDE 1
Inverse kinematics
Kinematics
The study of motion without regard to the forces that cause it Forward kinematics
Given a joint configuration, what is the position of an end point on the structure?
Inverse kinematics
Given the position for an end point on the structure, what angles do the joints need to be to achieve that end point?
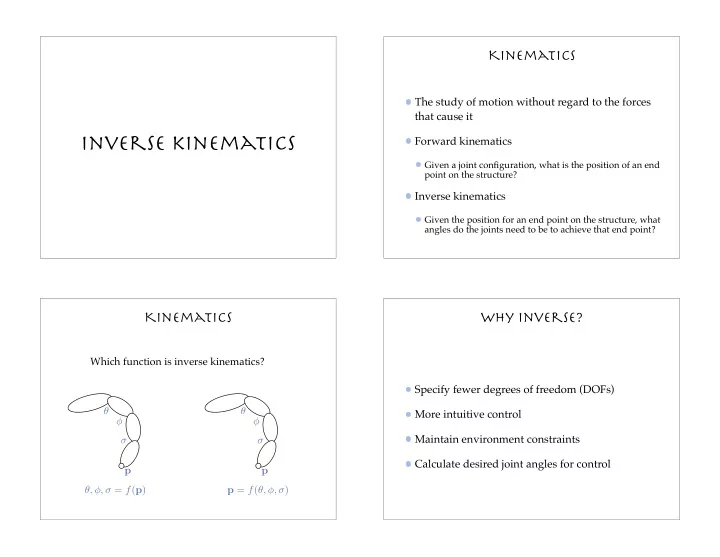
Kinematics
p θ φ σ θ, φ, σ = f(p) p θ φ σ p = f(θ, φ, σ) Which function is inverse kinematics?