
SLIDE 1
Gradient and Epigraph (contd)
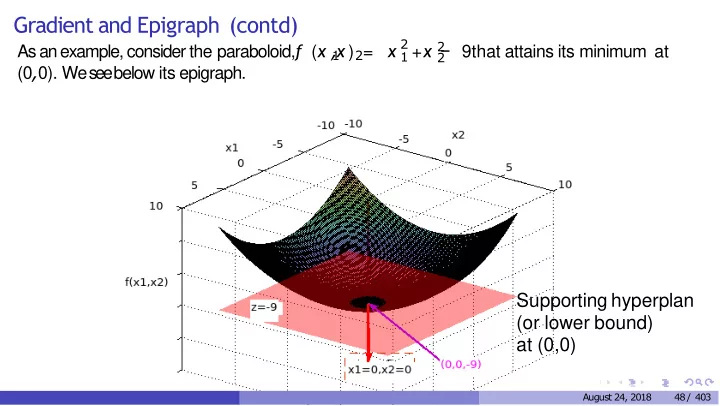
As an example, consider the paraboloid,f
1 2
(x ,x ) = x 2
1 2 2
+x − 9that attains its minimum at (0,0). We see below its epigraph.
Supporting hyperplan (or lower bound) at (0,0)
August 24, 2018 48 / 403