
SLIDE 1
Constitutive Equations
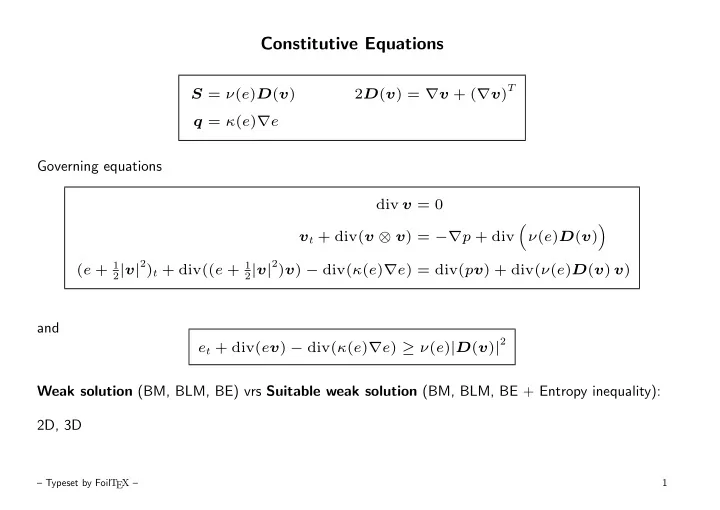
S = ν(e)D(v) 2D(v) = ∇v + (∇v)T q = κ(e)∇e Governing equations div v = 0 vt + div(v ⊗ v) = −∇p + div
- ν(e)D(v)
- (e + 1
Constitutive Equations 2 D ( v ) = v + ( v ) T S = ( e ) D ( v ) q - - PowerPoint PPT Presentation
Constitutive Equations 2 D ( v ) = v + ( v ) T S = ( e ) D ( v ) q = ( e ) e Governing equations div v = 0 v t + div( v v ) = p + div ( e ) D ( v ) 2 | v | 2 ) t + div(( e + 1 2 | v | 2 ) v ) div( (