
SLIDE 1
COMP9032: Microprocessors and Interfacing
Instruction Execution and Pipelining http://www.cse.unsw.edu.au/~cs9032 Lecturer: Hui Wu Session 2, 2008
2
Overview
- Processor organisation
- Instruction execution cycles
- Pipelining
3
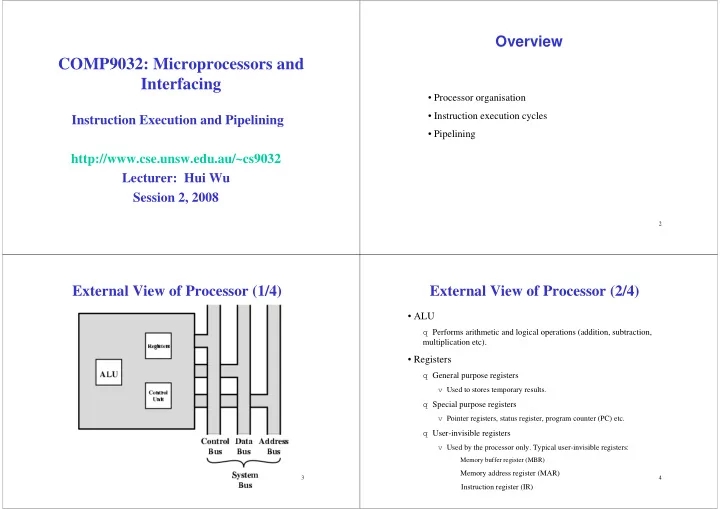
External View of Processor (1/4)
4
External View of Processor (2/4)
- ALU
q Performs arithmetic and logical operations (addition, subtraction, multiplication etc).
- Registers
q General purpose registers
v Used to stores temporary results.
q Special purpose registers
v Pointer registers, status register, program counter (PC) etc.
q User-invisible registers
v Used by the processor only. Typical user-invisible registers:
Memory buffer register (MBR) Memory address register (MAR)
Instruction register (IR)