
SLIDE 1
Institute of vehicle system technology
www.kit.edu
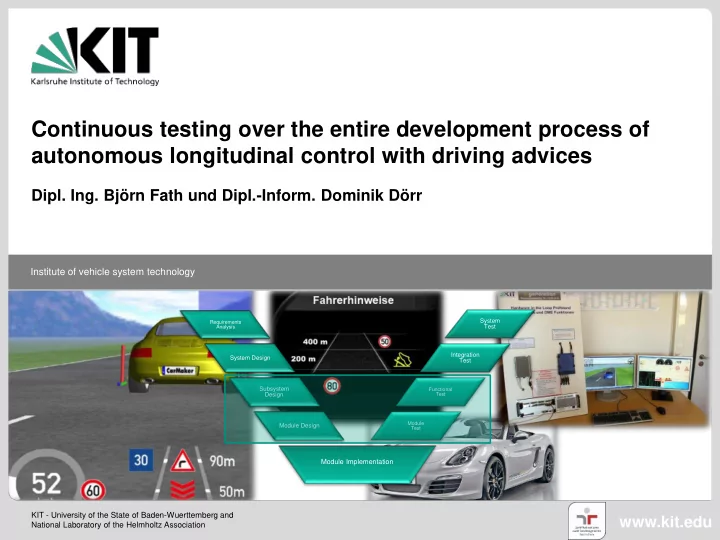
Module Test Functional Test
System Test Integration Test
M
Module Implementation
Module Design
Requirements Analysis
System Design Subsystem Design
KIT - University of the State of Baden-Wuerttemberg and National Laboratory of the Helmholtz Association
Continuous testing over the entire development process of autonomous longitudinal control with driving advices
- Dipl. Ing. Björn Fath und Dipl.-Inform. Dominik Dörr