
SLIDE 1
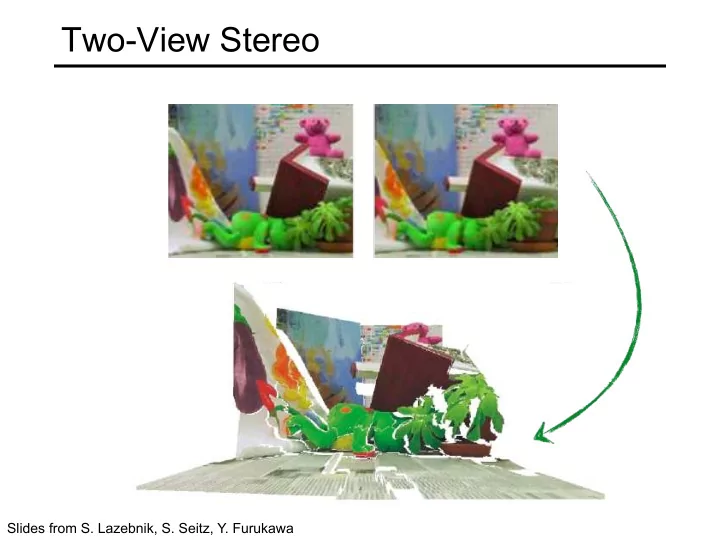
Two-View Stereo
Slides from S. Lazebnik, S. Seitz, Y. Furukawa
Two-View Stereo Slides from S. Lazebnik, S. Seitz, Y. Furukawa - - PowerPoint PPT Presentation
Two-View Stereo Slides from S. Lazebnik, S. Seitz, Y. Furukawa Stereo What cues tell us about scene depth? Slide from L. Lazebnik. Stereograms Humans can fuse pairs of images to get a sensation of depth Stereograms: Invented by Sir
Slides from S. Lazebnik, S. Seitz, Y. Furukawa
Slide from L. Lazebnik.
Stereograms: Invented by Sir Charles Wheatstone, 1838
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Autostereograms: www.magiceye.com
Slide from L. Lazebnik.
Autostereograms: www.magiceye.com
Slide from L. Lazebnik.
image 1 image 2 Dense depth map
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
´
´
t x x’
Slide from L. Lazebnik.
plane parallel to the line between optical centers
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Matching cost disparity Left Right scanline
Slide from L. Lazebnik.
Left Right scanline
SSD
Slide from L. Lazebnik.
Left Right scanline
Slide from L. Lazebnik.
Slide from L. Lazebnik.
1
1 + B2
Slide from L. Lazebnik.
1
1 − B2
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
+ More detail – More noise
+ Smoother disparity maps – Less detail
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Ordering constraint doesn’t hold
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Left image Right image Slide from L. Lazebnik.
Left image Right image
left
right
c
r e s p
d e n c e
q p
Left
t
Right
s
corr
Slide credit: Y. Boykov
Slide from L. Lazebnik.
Slide from L. Lazebnik.
via Graph Cuts, PAMI 2001
1(i)−W2(i + D(i))
i
2 + λ
neighbors i, j
data term smoothness term
Slide from L. Lazebnik.
Ability, arXiv 2017 Slide from L. Lazebnik.
Slide from L. Lazebnik.
http://bbzippo.wordpress.com/2010/11/28/kinect-in-infrared/
Slide from L. Lazebnik.
Slide from L. Lazebnik.
Digital Michelangelo Project Levoy et al.
http://graphics.stanford.edu/projects/mich/
Source: S. Seitz
The Digital Michelangelo Project, Levoy et al.
Source: S. Seitz
The Digital Michelangelo Project, Levoy et al.
Source: S. Seitz
The Digital Michelangelo Project, Levoy et al.
Source: S. Seitz
The Digital Michelangelo Project, Levoy et al.
Source: S. Seitz
The Digital Michelangelo Project, Levoy et al.
Source: S. Seitz
100 200 300 400 500 600 700 1 2 3 4 5 6 7 8
Distance (in cm) Quantization error (in cm)
Empirical Observations Quadratic Fit
Slide from L. Lazebnik.
Source: Y. Furukawa
Source: Y. Furukawa
Source: Y. Furukawa
Source: Y. Furukawa
Stereo, CVPR 2010.
Source: N. Snavely
Source: N. Snavely