
SLIDE 1
Search for Frame Search for Frame-
- Dragging
Dragging-
- Like Signals in the Vicinity of
Like Signals in the Vicinity of Spinning Superconductors Spinning Superconductors
- M. Tajmar
- M. Tajmar
Space Propulsion & Space Propulsion & Advanced Advanced Concepts Concepts Austrian Austrian Research Centers Research Centers
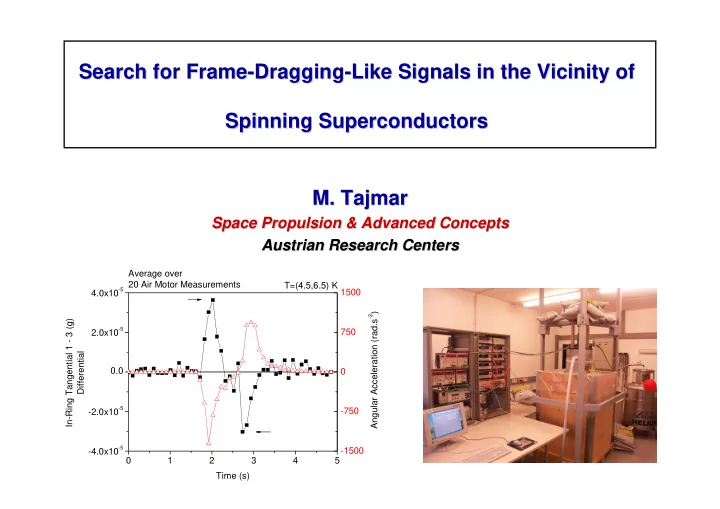
1 2 3 4 5
- 4.0x10
- 5
- 2.0x10
- 5
0.0 2.0x10
- 5
4.0x10
- 5
- 1500
- 750
750 1500 T=(4.5,6.5) K Average over 20 Air Motor Measurements Angular Acceleration (rad.s
- 2)
In-Ring Tangential 1 - 3 (g) Differential Time (s)