
SLIDE 1
Minimum Spanning Tree
Today’s announcements:
◮ PA3 due 5 April 11:59p ◮ Final Exam, 12 April 7:00p, SRC A & B
Today’s Plan:
◮ Prim’s algorithm ◮ Dijkstra’s shortest path algorithm
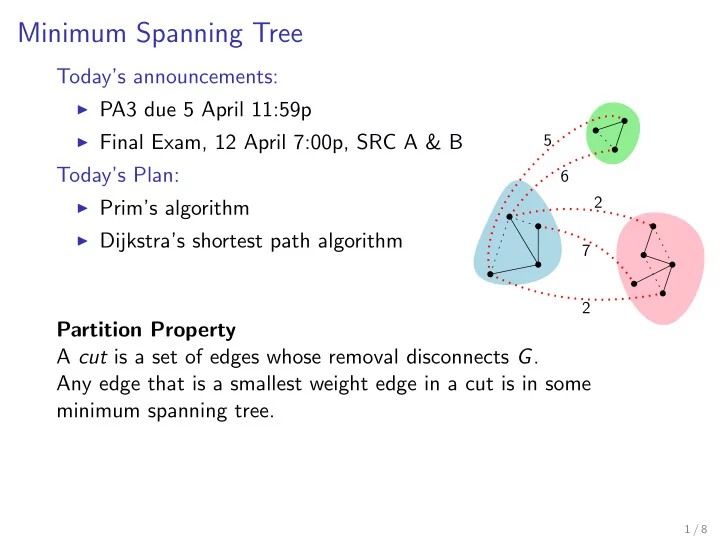
Partition Property A cut is a set of edges whose removal disconnects G. Any edge that is a smallest weight edge in a cut is in some minimum spanning tree.
1 / 8