
SLIDE 1
Lessons learned from the theory and practice of change detection
Mich` ele Basseville IRISA / CNRS, Rennes, France michele.basseville@irisa.fr -- http://www.irisa.fr/sisthem/
1
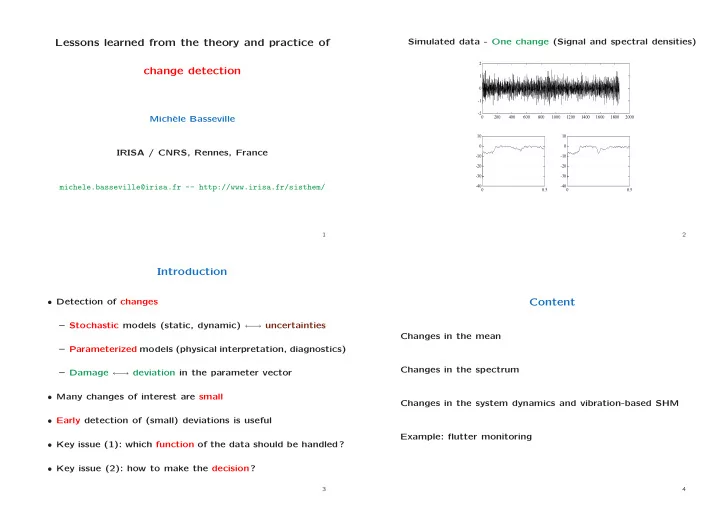
Simulated data - One change (Signal and spectral densities)
- 2
- 1
1 2 200 400 600 800 1000 1200 1400 1600 1800 2000
- 40
- 30
- 20
- 10
10 0.5
- 40
- 30
- 20
- 10
10 0.5
2
Introduction
- Detection of changes
– Stochastic models (static, dynamic) ← → uncertainties – Parameterized models (physical interpretation, diagnostics) – Damage ← → deviation in the parameter vector
- Many changes of interest are small
- Early detection of (small) deviations is useful
- Key issue (1): which function of the data should be handled?
- Key issue (2): how to make the decision?