
SLIDE 1
Hebbian Learning, Principal Component Analysis, and Independent Component Analysis
15-486/782: Artificial Neural Networks Fall 2006 (slides by Kornel Laskowski based on earlier slides by Dave Touretzky)
Hebbian Learning
Donald Hebb wrote in 1949: When an axon in cell A is near enough to excite cell B and repeat- edly and persistently takes part in firing it, some growth process
- r metabolic change takes place in one or both cells such that A’s
efficiency in firing B is increased. Today this growth process is known as Hebbian learning.
2
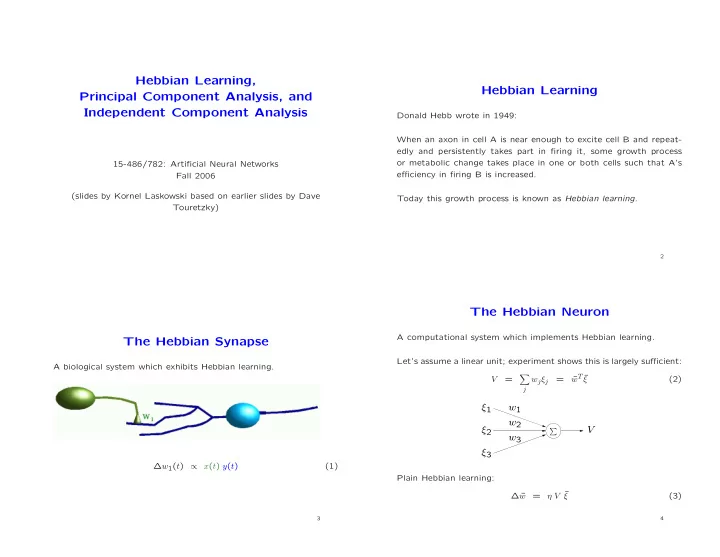
The Hebbian Synapse
A biological system which exhibits Hebbian learning. ∆w1(t) ∝ x(t) y(t) (1)
3
The Hebbian Neuron
A computational system which implements Hebbian learning. Let’s assume a linear unit; experiment shows this is largely sufficient: V =
- j
wjξj = ¯ wT ¯ ξ (2)
ξ1 ξ2 ξ3 V
- w1
w2 w3
Plain Hebbian learning: ∆ ¯ w = η V ¯ ξ (3)
4