
1
1
EmTOS
A Platform for Simulating Heterogeneous Systems
Presented by
Brian Vacek
2
What is a “Heterogeneous System”?
□ An environment that includes mote s (running on TinyOS) and mic r
- se r
ve r s (more
expensive, high-power, low-distribution servers running on Linux) □ Systems in which motes vary in OS, design, applications or sensor capabilities □ Systems that must test gateways, interfering systems and emerging technologies
3
□
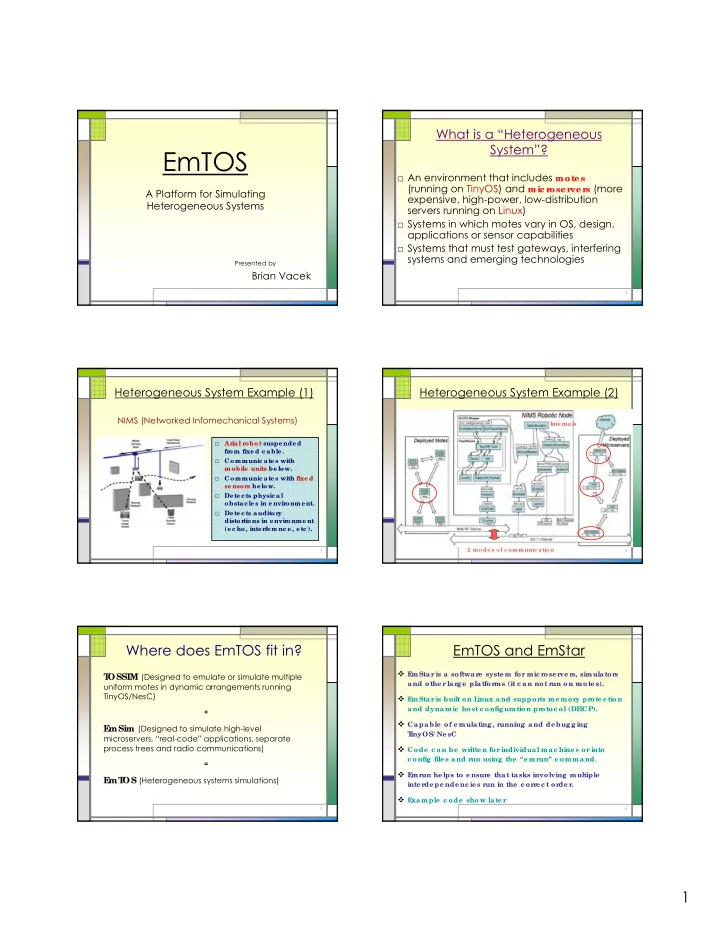
Arial robot suspe nde d from fixe d c a ble .
□
Communic a te s with mobile units be low.
□
Communic a te s with fixe d se nsors be low.
□
De te c ts physic a l
- bsta c le s in e nvir
- nme nt.
□
De te c ts a uditory distor tions in e nvironme nt (e c ho, inte rfe r e nc e , e tc ).
Heterogeneous System Example (1)
NIMS (Networked Infomechanical Systems)
4
Heterogeneous System Example (2)
Inte r na ls 2 mode s of c ommunic a tion
5
Where does EmTOS fit in?
T OSSIM (Designed to emulate or simulate multiple
uniform motes in dynamic arrangements running TinyOS/NesC)
+
E mSim (Designed to simulate high-level
microservers, “real-code” applications, separate process trees and radio communications)
=
E mT OS (Heterogeneous systems simulations)
6
EmTOS and EmStar
E
mSta r is a softwa r e syste m for mic r
- se r
ve r s, simula tor s a nd othe r la r g e pla tforms (it c a n not run on mote s).
E
mSta r is built on L inux a nd suppor ts me mory prote c tion a nd dyna mic host c onfig ur a tion pr
- toc ol (DHCP).
Ca pable of e mulating , running a nd de bug g ing
T inyOS/ Ne sC
Code c a n be wr
itte n for individua l ma c hine s or into c onfig file s a nd run using the “e mrun” c omma nd.
E
mr un he lps to e nsur e tha t ta sks involving multiple inte r de pe nde nc ie s r un in the c or r e c t or de r .
E
xa mple c ode show la te r