
SLIDE 1
Chenyang Lu
SIGMETRICS 2008: Introduc5on to Control Theory. Abdelzaher, Diao, Hellerstein, Lu, and Zhu.
1
CPU U%liza%on Control in Distributed Real‐Time Systems
Chenyang Lu
CSE 520S
Highlight
Common class of compu5ng problems
- MIMO: mul5‐input (knobs), mul5‐output (objec5ves)
- Coupling between objec5ves.
- Constraints on knobs.
Model Predic5ve Control
- Op5miza5on + Predic5on + Feedback
2
Why CPU U%liza%on Control?
- Overload protec5on
CPU over‐u5liza5on system crash
- Meet response 5me requirement
CPU u5liza5on < bound meet deadlines
3
Challenge: Uncertain%es
- Execu5on 5mes?
Unknown sensor data or user input
- Request arrival rate?
Aperiodic events
Bursty service requests
- Disturbance?
Denial of Service a^acks
Control‐theore5c approach Robust u5liza5on control in face of workload uncertainty
4
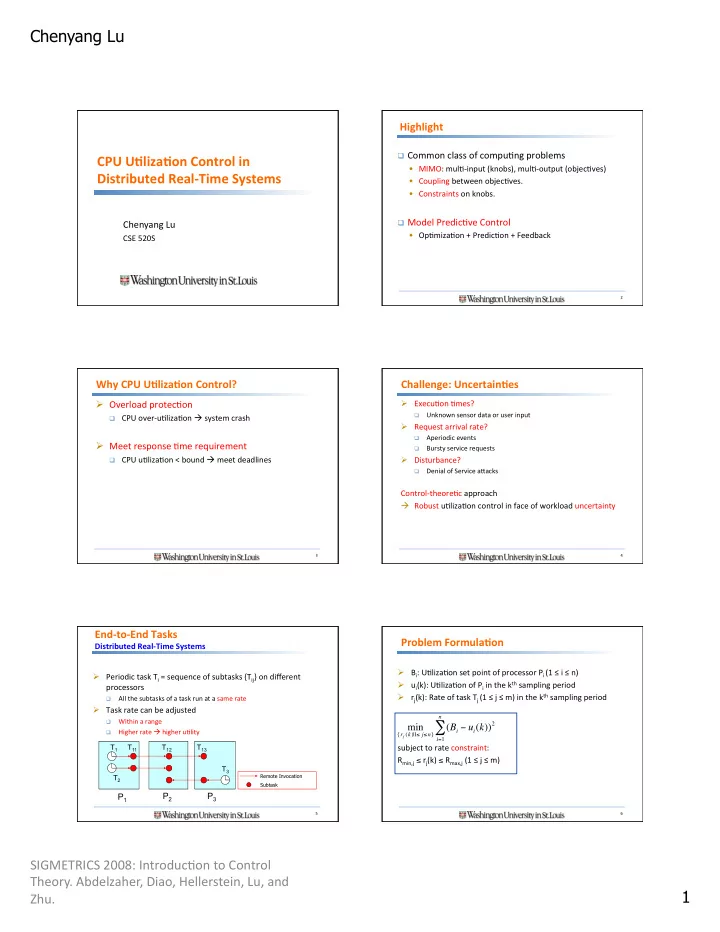
End‐to‐End Tasks
Distributed Real‐Time Systems
- Periodic task Ti = sequence of subtasks {Tij} on different
processors
All the subtasks of a task run at a same rate
- Task rate can be adjusted
Within a range
Higher rate higher u5lity
5
Remote Invocation Subtask
T1 T2 T3 T11 T12 T13
P1 P2 P3
Problem Formula%on
- Bi: U5liza5on set point of processor Pi (1 ≤ i ≤ n)
- ui(k): U5liza5on of Pi in the kth sampling period
- rj(k): Rate of task Tj (1 ≤ j ≤ m) in the kth sampling period
subject to rate constraint: Rmin,j ≤ rj(k) ≤ Rmax,j (1 ≤ j ≤ m)
6
min
{rj (k)|1≤ j≤n}
(Bi − ui(k))2
i=1 n