
SLIDE 1
Einführung in Visual Computing
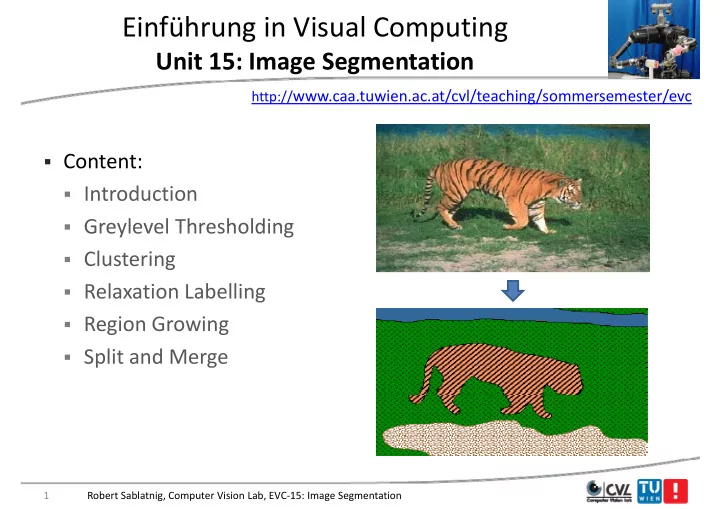
U it 15 I S t ti Unit 15: Image Segmentation
http://www.caa.tuwien.ac.at/cvl/teaching/sommersemester/evc
- Content:
- Introduction
- Greylevel Thresholding
- Greylevel Thresholding
- Clustering
- Relaxation Labelling
- Region Growing
- Split and Merge
1 Robert Sablatnig, Computer Vision Lab, EVC‐15: Image Segmentation