
SLIDE 1
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
1
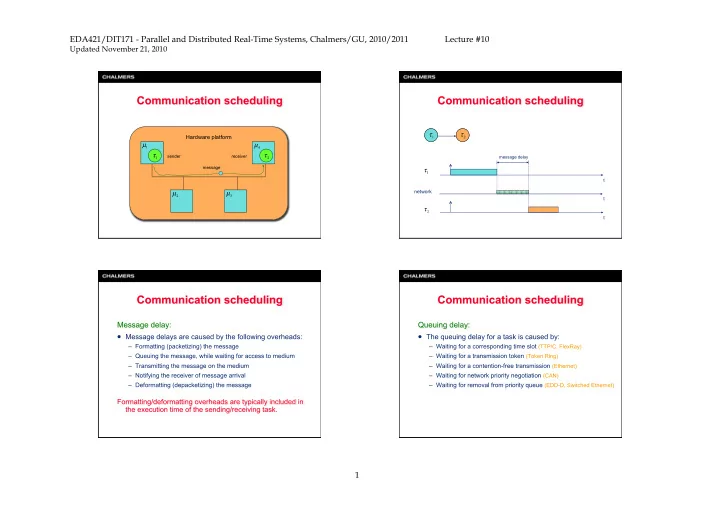
Hardware platform
message sender receiver message delay
T1 T2
t t
network
t
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, - - PowerPoint PPT Presentation
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10 Updated November 21, 2010 T 1 T 2 Hardware platform sender receiver message delay message t network t t 1 EDA421/DIT171 -
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
1
Hardware platform
message sender receiver message delay
T1 T2
t t
network
t
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
2
and – Communication distance (m) – Signal propagation velocity (m/s) – Message length (bits) – Data rate (bits/s)
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
3
release jitter
queuing delay transmission delay notification delay T1 T2
t t
network
t
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
4
T1 T2
t t
network
t
dedicated time slot
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
5
– Based on the CAN protocol – Bus topology – Media: twisted pair – 1Mbit/s
Node 2 Node 7 Node 1 Node 4 Node 3 Node 6 Node 5 A S S SCPU/ mem/CC Node
A second controller is required to implement the redundant bus
Basic cycle Basic cycle 1 Basic cycle 2 Basic cycle 3
Transmission Columns
t
”Exclusive” – guaranteed service ”Arbitration” – guaranteed service (high ID), best effort (low ID) ”Reserved” – for future expansion...
Time is global and measured in network time units (NTU’s)
Node 1 Node 4 Node 3 Node 2 Node 6 Node 5A B
Node 1 Node 2 Node 3 Node 4 Node 5 Node 6– Double channels (one redundant). Bus topology or ”star” (optical) – Media: twisted pair, fibre – 10 Mbit/s for each channel
A S S SCPU/ mem/CC Node
A network is built on either twin buses or twin stars. Non-periodic messages have to be fitted into static slots by the application
”TDMA-round”
”message slots” t All communication is statically scheduled
Guaranteed service
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
6
Node 1 Node 3 Node 2 Node 6 Node 5A B
Node 7Node 4
Redundant channel can be used for an alternative schedule
A S S SCPU/ mem/CC Node
– Double channels, bus or star (even mixed). – Media: twisted pair, fibre – 10 Mbit/s for each channel
Guaranteed periodical Guaranteed periodical/ aperiodical ”Best-effort” aperiodical 63 62 3 2 1 Network Idle Time Symbol window Static segment (m slots) Dynamic segment (n mini-slots)
Max 64 nodes on a Flexray network.
”Static segment” (compare w/ TTCAN ”Exclusive”) – guaranteed service ”Dynamic segment” (compare w/ TTCAN ”Arbitration”) – guaranteed service (high ID), ”best effort” (low ID)
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
7
A necessary feasibility test: A sufficient feasibility test:
constantly rotating token
SD AC ED ED FS addresses packet data error control Message frame format SD AC ED Token format P P P T M R R R P P P R R R AC AC
PPP: priority field RRR: reservation field
inserts the priority of its pending message only if it is greater than the priority currently in RRR.
pending message is at least as high as the priority in PPP. Then the token status is changed to “busy”.
“busy” token and sets RRR appropriately.
token before releasing the next “free” token with PPP set to the (possibly) updated RRR.
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
8
A sufficient and necessary feasibility test:
– Capture token when node has highest-priority message pending – Transmit message – Transmit subsequent free token
collision-detect broadcast bus
EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2010/2011 Lecture #10
Updated November 21, 2010
9
11-bit identifier 0 - 8 bytes of message data error control SOF Ack EOF control
pending on the node. Identifier is transmitted first, in the order
bit (’0’) on the bus, then it stops transmitting since it is not transmitting the highest-priority message in the system.
detecting a bus inconsistency has the highest priority and can start transmitting the body of the message.