
SLIDE 1
CGL slideset 1
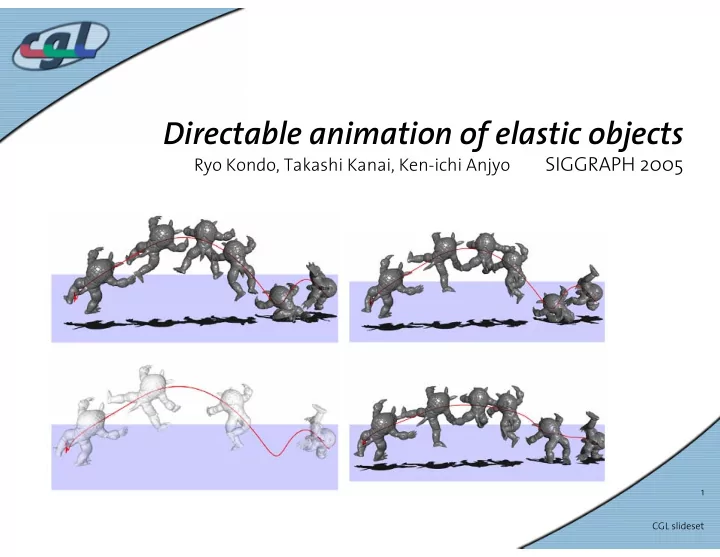
Directable animation of elastic objects
Ryo Kondo, Takashi Kanai, Ken-ichi Anjyo
SIGGRAPH 2005
Directable animation of elastic objects SIGGRAPH 2005 Ryo Kondo, - - PowerPoint PPT Presentation
Directable animation of elastic objects SIGGRAPH 2005 Ryo Kondo, Takashi Kanai, Ken-ichi Anjyo 1 CGL slideset Outline Introduction Directable animation framework Physically-based elastic body animation Deformation control
CGL slideset 1
Ryo Kondo, Takashi Kanai, Ken-ichi Anjyo
SIGGRAPH 2005
CGL slideset 2
CGL slideset 3
– Keyframe control as the most intuitive method (intentional). – Physical simulation has also become widely used (obeys physical laws).
user-specified expressive motion.
– Keyframing of smoke simulation. – Trajectory control of rigid body simulation.
CGL slideset 4
want:
1. Physical realism. 2. Edit the local geometry of an object at a given time as the user desires. 3. Edit the trajectory of an object as the user desires.
1. Physically-based elastic body animation. 2. Deformation control. 3. Trajectory control.
CGL slideset 5
CGL slideset 6
given time.
keyframes.
CGL slideset 7
velocity and rotation).
CGL slideset 8
CGL slideset 9
CGL slideset 10
– Stiffness matrix K and original position o define the resting shape of an elastic object.
CGL slideset 11
keyframe by the user-defined keyframe shape.
CGL slideset 12
shapes are large.
elastic object between keyframes.
CGL slideset 13
neighbor resting shapes Rp and Rq.
CGL slideset 14
Rp as initial state with Kq, oq derived from Rq.
CGL slideset 15
time-varying stiffness matrix K(t) and original position
CGL slideset 16
CGL slideset 17
CGL slideset 18
CGL slideset 19
tetrahedral element i.
rotation matrix is:
CGL slideset 20
simulation point, at each time step. Correct positions and velocities:
CGL slideset 21
CGL slideset 22
CGL slideset 23
deformation control.
adding keyframes before and after collisions.
time.
CGL slideset 24
the objects.
CGL slideset 25
Trajectory is only a constraint.
CGL slideset 26