
SLIDE 1
Autonomous Naval MCM - Neutralization
1
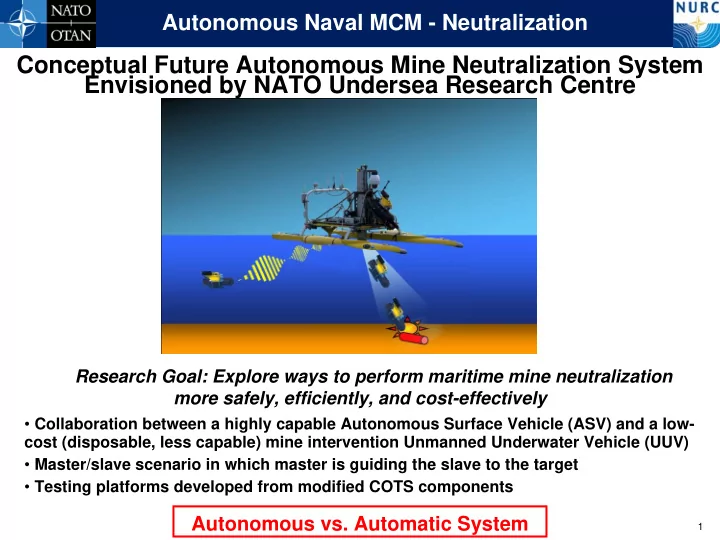
Research Goal: Explore ways to perform maritime mine neutralization more safely, efficiently, and cost-effectively
- Collaboration between a highly capable Autonomous Surface Vehicle (ASV) and a low-
cost (disposable, less capable) mine intervention Unmanned Underwater Vehicle (UUV)
- Master/slave scenario in which master is guiding the slave to the target
- Testing platforms developed from modified COTS components