
SLIDE 1
Slides borrowed from: Latombe’s book and slides, Choset, Kuffner
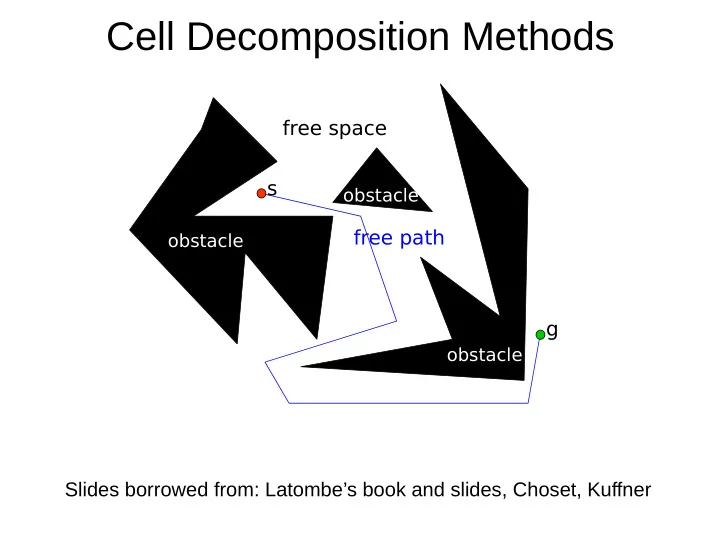
Cell Decomposition Methods
free space s g free path
- bstacle
- bstacle
- bstacle
Cell Decomposition Methods free space s obstacle free path - - PowerPoint PPT Presentation
Cell Decomposition Methods free space s obstacle free path obstacle g obstacle Slides borrowed from: Latombes book and slides, Choset, Kuffner Problem Given: a point-robot (robot is a point in space) a start and goal
Given: – a point-robot (robot is a point in space) – a start and goal configuration Find: – path from start to goal that does not result in a collision
critical events criticality-based decomposition