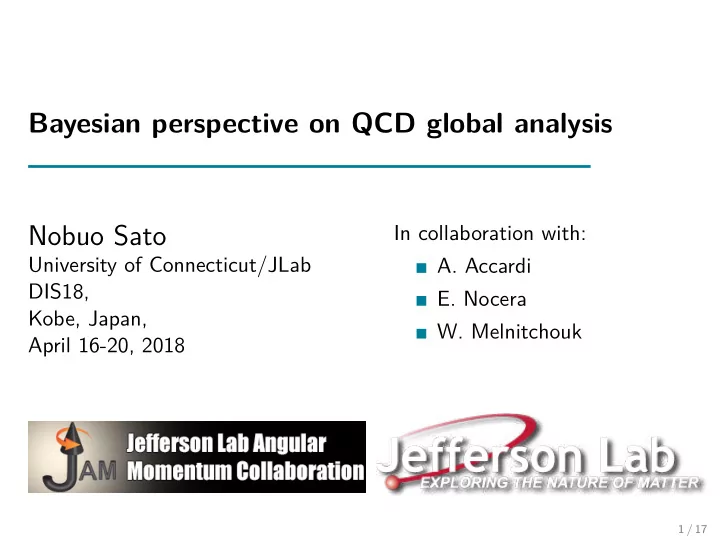
SLIDE 14 Likelihood profile in CJ15
14 / 17
−100 −50 50 100 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 Likelihood
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34
−100 −50 50 100 2000 4000 6000 8000 10000 ∆χ2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34
−10 −5 5 10 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 Likelihood
1 2 3 5 8 12 17 18 27 28 29 30 31 34
−10 −5 5 10 20 40 60 80 100 ∆χ2
(0) TOTAL (1) HerF2pCut (2) slac p (3) d0Lasy13 (4) e866pd06xf (5) BNS F2nd (6) NmcRatCor (7) slac d (8) D0 Z (9) H2 NC ep 3 (10) H2 NC ep 2 (11) H2 NC ep 1 (12) H2 NC ep 4 (13) CDF Wasy (14) H2 CC ep (15) cdfLasy05 (16) NmcF2pCor (17) e866pp06xf (18) H2 CC em (19) d0run2cone (20) d0 gamjet1 (21) CDFrun2jet (22) d0 gamjet3 (23) d0 gamjet2 (24) d0 gamjet4 (25) jl00106F2d (26) HerF2dCut (27) BcdF2dCor (28) CDF Z (29) D0 Wasy (30) H2 NC em (31) jl00106F2p (32) d0Lasy e15 (33) BcdF2pCor
−1.0 −0.8 −0.6 −0.4 −0.2 0.0 0.2 0.4 0.6 Projection
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
(0) a1uv (1) a2uv (2) a4uv (3) a1dv (4) a2dv (5) a3dv (6) a4dv (7) a0ud (8) a1ud (9) a2ud (10) a4ud (11) a1du (12) a2du (13) a4du (14) a1g (15) a2g (16) a3g (17) a4g (18) a6dv (19) off1 (20) off2 (21) ht1 (22) ht2 (23) ht3
24 parameters, 33 data sets Eigen direction without incompatibilities