
SLIDE 1
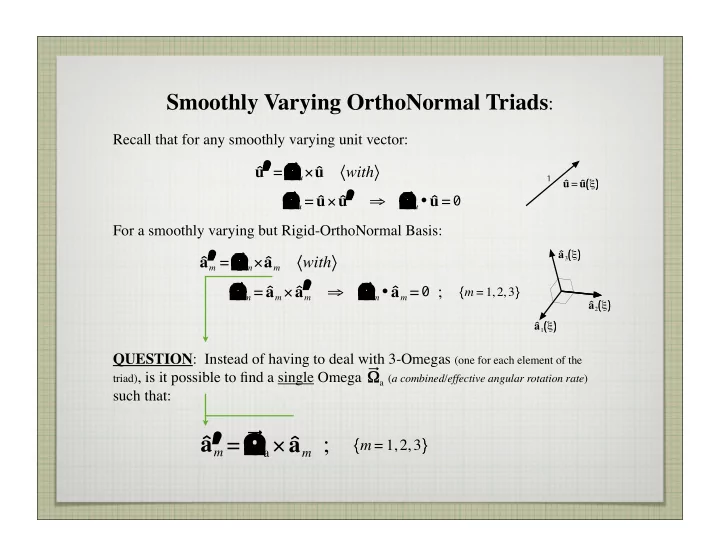
QUESTION: Instead of having to deal with 3-Omegas (one for each element of the
triad), is it possible to find a single Omega (a combined/effective angular rotation rate)
such that:
Smoothly Varying OrthoNormal Triads:
Recall that for any smoothly varying unit vector:
u′ = Ωu×u with
Ωu = u×u′
⇒ Ωu•u = 0 am ′ = Ωm×am with
Ωm = am×am
′ ⇒ Ωm•am = 0 ;
m = 1,2,3
u = u
1
a1 a2 a3