
SLIDE 1
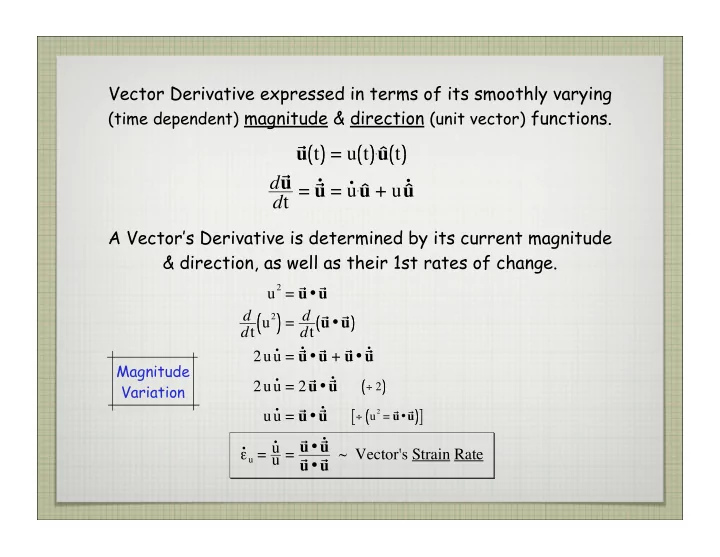
Vector Derivative expressed in terms of its smoothly varying
(time dependent) magnitude & direction (unit vector) functions.
u t = u t u t du dt = u
- = u
- u + uu
- A Vector’s Derivative is determined by its current magnitude
& direction, as well as their 1st rates of change.
u
2= u•u
d dt u
2 = d
dt u•u 2uu
- = u
- •u + u•u
- 2uu
- = 2u•u
- ÷ 2
uu
- = u•u
- ÷ u
2= u•u
- u = u
u
- = u•u
- u•u ~ Vector's Strain Rate
Magnitude Variation