
SLIDE 1
Game playing
Chapter 6
Chapter 6 1
Outline
♦ Games ♦ Perfect play – minimax decisions – α–β pruning ♦ Resource limits and approximate evaluation ♦ Games of chance ♦ Games of imperfect information
Chapter 6 2
Games vs. search problems
“Unpredictable” opponent ⇒ solution is a strategy specifying a move for every possible opponent reply Time limits ⇒ unlikely to find goal, must approximate Plan of attack:
- Computer considers possible lines of play (Babbage, 1846)
- Algorithm for perfect play (Zermelo, 1912; Von Neumann, 1944)
- Finite horizon, approximate evaluation (Zuse, 1945; Wiener, 1948;
Shannon, 1950)
- First chess program (Turing, 1951)
- Machine learning to improve evaluation accuracy (Samuel, 1952–57)
- Pruning to allow deeper search (McCarthy, 1956)
Chapter 6 3
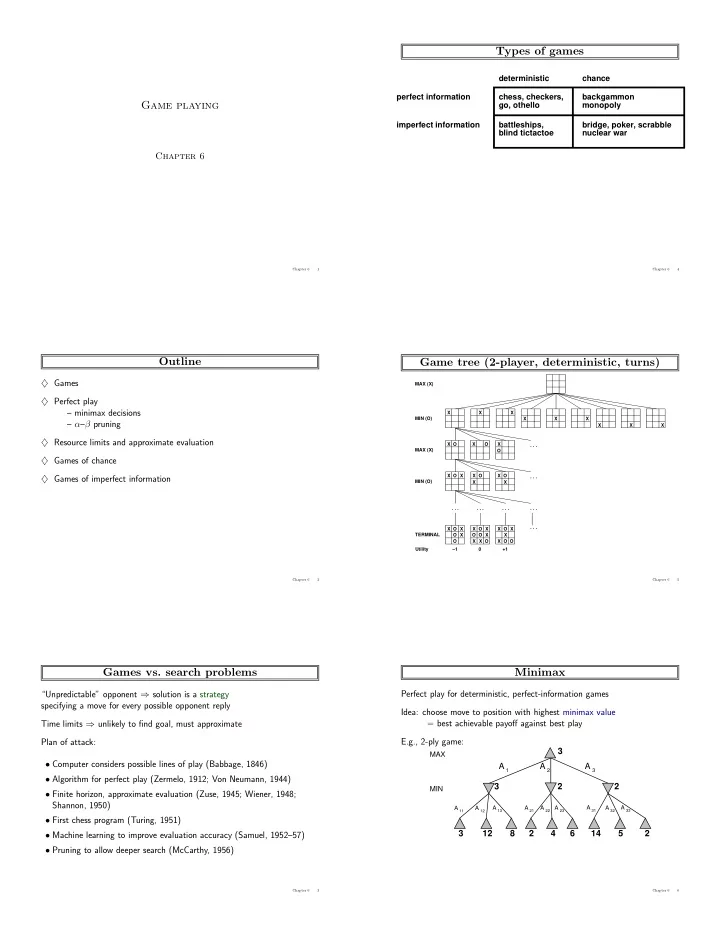
Types of games
deterministic chance perfect information imperfect information chess, checkers, go, othello backgammon monopoly bridge, poker, scrabble nuclear war battleships, blind tictactoe
Chapter 6 4
Game tree (2-player, deterministic, turns)
X X X X X X X X X MAX (X) MIN (O) X X O O O X O O O O O O O MAX (X) X O X O X O X X X X X X X MIN (O) X O X X O X X O X . . . . . . . . . . . . . . . . . . . . . TERMINAL X X −1 +1 Utility
Chapter 6 5
Minimax
Perfect play for deterministic, perfect-information games Idea: choose move to position with highest minimax value = best achievable payoff against best play E.g., 2-ply game:
MAX
3 12 8 6 4 2 14 5 2
MIN
3 A 1 A 3 A 2
A 13 A 12 A 11 A 21 A 23 A 22 A 33 A 32 A 31
3 2 2
Chapter 6 6