
SLIDE 1
Transformations in 3D Right-handed coordinate system z-axis points - - PowerPoint PPT Presentation
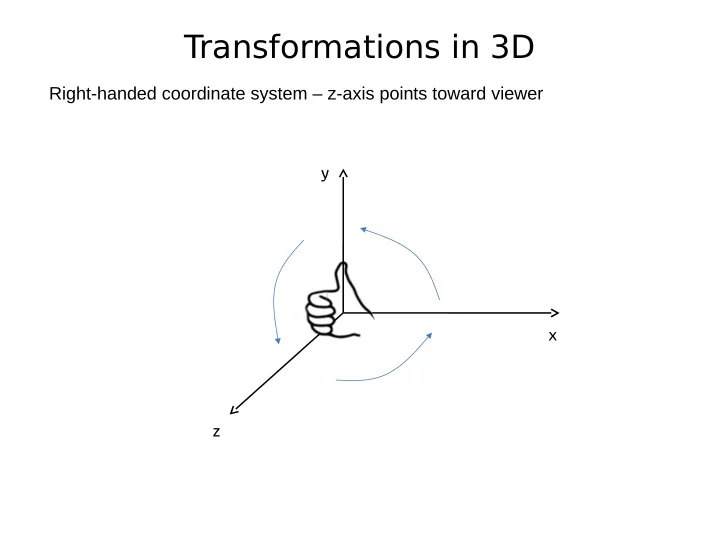
Transformations in 3D Right-handed coordinate system z-axis points toward viewer y x z Translation in 3D What are the coordinates of P after translating by d=(dx,dy,dz) x' = ? y' = ? P'(x',y', z') z' = ? P(x,y,z) Translation in 3D
P(x,y,z) P'(x',y', z')
P(x,y,z) P'(x',y', z')
1 dx 1 dy 1 dz 1
P(x,y,z) P'(x',y',z')
P(x,y,z) P'(x',y',z')
sx sy sz 1
P(x,y,z) a r r P'(x',y',z') P(x,y,z) a r r P'(x',y',z')
cosα
sinα cosα 1 1
P(x,y,z) a r r P'(x',y',z') P(x,y,z) a r r P'(x',y',z')
P'(x',y',z') P(x,y,z)
a P'(x',y',z') P(x,y,z) a
cosα sinα 1
cosα 1
P'(x',y',z') P(x,y,z)
a P'(x',y',z') P(x,y,z) a
P(x,y,z) P'(x',y',z') α P(x,y,z) P'(x',y',z') α
1 cosα
sinα cosα 1
P(x,y,z) P'(x',y',z') α P(x,y,z) P'(x',y',z') α
P(x,y,z) α P'(x',y',z') A(ax,ay,az)
P(x,y,z) A(ax,ay,az)
P(x,y,z) A(ax,ay,az) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”)
P(x,y,z) A(ax,ay,az) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”)
P(x,y,z) A(ax,ay,az) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”)
ax' ay' az' ax” ay” az” ax ay az 1
P(x,y,z) A(ax,ay,az) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) P(x,y,z) P'(x',y',z') A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) α
ax' ay' az' ax” ay” az” ax ay az 1
ca
sa ca 1 1
P(x,y,z) α P'(x',y',z') A(ax,ay,az) P(x,y,z) A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) P(x,y,z) P'(x',y',z') A(ax,ay,az) A'(ax',ay',az') A”(ax”,ay”,az”) α
ax' ay' az' ax” ay” az” ax ay az 1
ax' ax” ax ay' ay” ay az' az” az 1
ca
sa ca 1 1
P(x,y,z) α P'(x',y',z') A(ax,ay,az)
http://www.songho.ca/opengl/gl_transform.html
1
1
1
1
1
1 vx vy ux uy 1
1
1
1 vx vy ux uy 1