
SLIDE 1
9/8/05 Jie Gao, CSE590-fall05 1
Time of Arrival ( Time of Arrival (ToA ToA) )
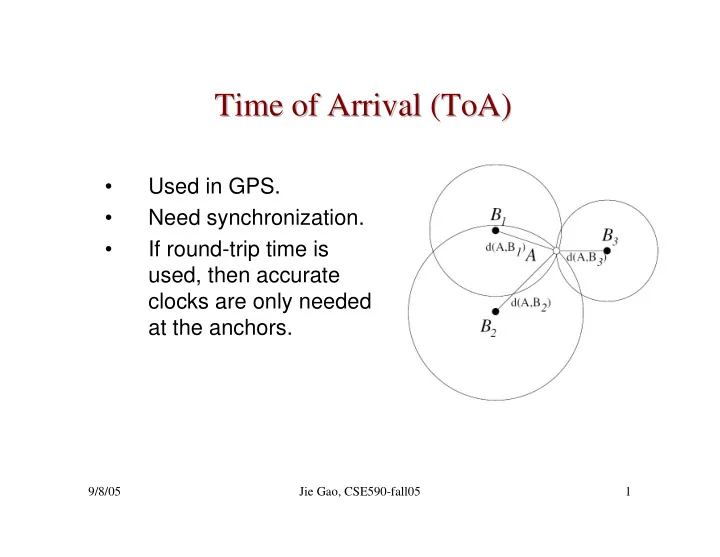
- Used in GPS.
- Need synchronization.
- If round-trip time is
Time of Arrival (ToA ToA) ) Time of Arrival ( Used in GPS. - - PowerPoint PPT Presentation
Time of Arrival (ToA ToA) ) Time of Arrival ( Used in GPS. Need synchronization. If round-trip time is used, then accurate clocks are only needed at the anchors. 9/8/05 Jie Gao, CSE590-fall05 1 Time Difference of Arrival
9/8/05 Jie Gao, CSE590-fall05 1
9/8/05 Jie Gao, CSE590-fall05 2
9/8/05 Jie Gao, CSE590-fall05 3
9/8/05 Jie Gao, CSE590-fall05 4
Computer Science Department Stony Brook University
9/8/05 Jie Gao, CSE590-fall05 5
Yang Richard Yang, A. Stephen Morse, Brian D.O. Anderson and Peter N. Belhumeur, Rigidity, Computation, and Randomization of Network Localization. In Proceedings of IEEE INFOCOM, Hong Kong, China, April 2004.
for two dimensional rigidity percolation: The pebble
rigidity theory.
9/8/05 Jie Gao, CSE590-fall05 6
9/8/05 Jie Gao, CSE590-fall05 7
9/8/05 Jie Gao, CSE590-fall05 8
9/8/05 Jie Gao, CSE590-fall05 9
9/8/05 Jie Gao, CSE590-fall05 10
9/8/05 Jie Gao, CSE590-fall05 11
9/8/05 Jie Gao, CSE590-fall05 12
– Is C(L) non-empty?
– How many points does C(L) contain?
– What is the dimension of the configuration space?
– Is C(L) connected? – What is the topology of C(L)? How many connected components of C(L)?
9/8/05 Jie Gao, CSE590-fall05 13
9/8/05 Jie Gao, CSE590-fall05 14
9/8/05 Jie Gao, CSE590-fall05 15
9/8/05 Jie Gao, CSE590-fall05 16
9/8/05 Jie Gao, CSE590-fall05 17
i j i j
2 2
ij i i j i j
9/8/05 Jie Gao, CSE590-fall05 18
i j i j
1 2
n
9/8/05 Jie Gao, CSE590-fall05 19
9/8/05 Jie Gao, CSE590-fall05 20
9/8/05 Jie Gao, CSE590-fall05 21
i j i j
9/8/05 Jie Gao, CSE590-fall05 22
m rows 2n columns Global translation and rotation ,
i j i j
p p v v − − =
n nodes
9/8/05 Jie Gao, CSE590-fall05 23
9/8/05 Jie Gao, CSE590-fall05 24
9/8/05 Jie Gao, CSE590-fall05 25
9/8/05 Jie Gao, CSE590-fall05 26
9/8/05 Jie Gao, CSE590-fall05 27
9/8/05 Jie Gao, CSE590-fall05 28
9/8/05 Jie Gao, CSE590-fall05 29
9/8/05 Jie Gao, CSE590-fall05 30
9/8/05 Jie Gao, CSE590-fall05 31
9/8/05 Jie Gao, CSE590-fall05 32
9/8/05 Jie Gao, CSE590-fall05 33
9/8/05 Jie Gao, CSE590-fall05 34
9/8/05 Jie Gao, CSE590-fall05 35
9/8/05 Jie Gao, CSE590-fall05 36
9/8/05 Jie Gao, CSE590-fall05 37
9/8/05 Jie Gao, CSE590-fall05 38
Unfortunately, the condition is necessary but not sufficient. It’s a long open problem what is the combinatorial condition for rigidity in 3D.
9/8/05 Jie Gao, CSE590-fall05 39
9/8/05 Jie Gao, CSE590-fall05 40
a e b f c d a c b e d f
Solution: G must be 3-connected G must be redundantly rigid: It must remain rigid upon removal of any single edge G must rigid
9/8/05 Jie Gao, CSE590-fall05 41
A graph is connected upon removal of any 2 vertices.
9/8/05 Jie Gao, CSE590-fall05 42
9/8/05 Jie Gao, CSE590-fall05 43
9/8/05 Jie Gao, CSE590-fall05 44
9/8/05 Jie Gao, CSE590-fall05 45
“quadruple an edge”
9/8/05 Jie Gao, CSE590-fall05 46
– Quadruple the new edge and test the Laman condition.
9/8/05 Jie Gao, CSE590-fall05 47
9/8/05 Jie Gao, CSE590-fall05 48
initial testing e for independence assignment e copy 1 of e copy 2 of e copy 3 of e copy 4 of e e copy 4 of e assignment
9/8/05 Jie Gao, CSE590-fall05 49
– If either has a free pebble, use it to cover the edge and we are done. – Otherwise, their pebbles are covering existing edges. If a vertex at other end of one of these edges has a free pebble, then use that pebble to cover existing edge, freeing up pebble to cover new edge.
– If edge ea,b is covered by a pebble from vertex a, the edge if directed from a to b.
9/8/05 Jie Gao, CSE590-fall05 50
unassigned pebble New edge
Do a depth-first search following the directed edges for free pebbles.
9/8/05 Jie Gao, CSE590-fall05 51
9/8/05 Jie Gao, CSE590-fall05 52
9/8/05 Jie Gao, CSE590-fall05 53
9/8/05 Jie Gao, CSE590-fall05 54