
SLIDE 1
useR! 2006 Vienna, June 15-17, 2006
- Click to edit Master text styles
- Second level
- Third level
- Fourth level
- Fifth level
Sequential Monte Carlo Methods in R
Thomas Jakobsen Jeffrey Todd Lins Saxo Bank A/S jtl@saxobank.com, tj@saxobank.com
www.saxobank.com
useR! 2006 Vienna, June 15-17, 2006
- Click to edit Master text styles
- Second level
- Third level
- Fourth level
- Fifth level
Overview
- The model
- An introduction to sequential Monte Carlo methods
- Algorithm & implementation
- A factor stochastic volatility model
- Example, artificial 2-factor model
- Analysis of forex data
- Conclusions
useR! 2006 Vienna, June 15-17, 2006
- Click to edit Master text styles
- Second level
- Third level
- Fourth level
- Fifth level
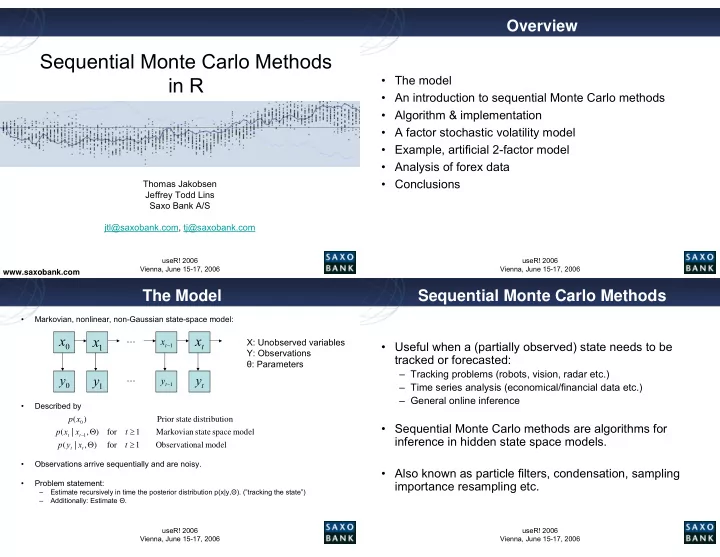
The Model
- Markovian, nonlinear, non-Gaussian state-space model:
- Described by
- Observations arrive sequentially and are noisy.
- Problem statement:
– Estimate recursively in time the posterior distribution p(x|y,Θ). (”tracking the state”) – Additionally: Estimate Θ.
x
1
x
1 − t
x
t
x
… X: Unobserved variables Y: Observations θ: Parameters
y
1
y
1 − t
y
t
y
… model nal Observatio 1 for ) , | ( model space state Markovian 1 for ) , | (
- n
distributi state Prior ) (
1
≥ Θ ≥ Θ
−
t x y p t x x p x p
t t t t
useR! 2006 Vienna, June 15-17, 2006
- Click to edit Master text styles
- Second level
- Third level
- Fourth level
- Fifth level
Sequential Monte Carlo Methods
- Useful when a (partially observed) state needs to be
tracked or forecasted:
– Tracking problems (robots, vision, radar etc.) – Time series analysis (economical/financial data etc.) – General online inference
- Sequential Monte Carlo methods are algorithms for
inference in hidden state space models.
- Also known as particle filters, condensation, sampling