
SLIDE 1
1
Search: Uninformed Search
Material in part from http://www.cs.cmu.edu/~awm/tutorials Russel & Norvig Chap. 3
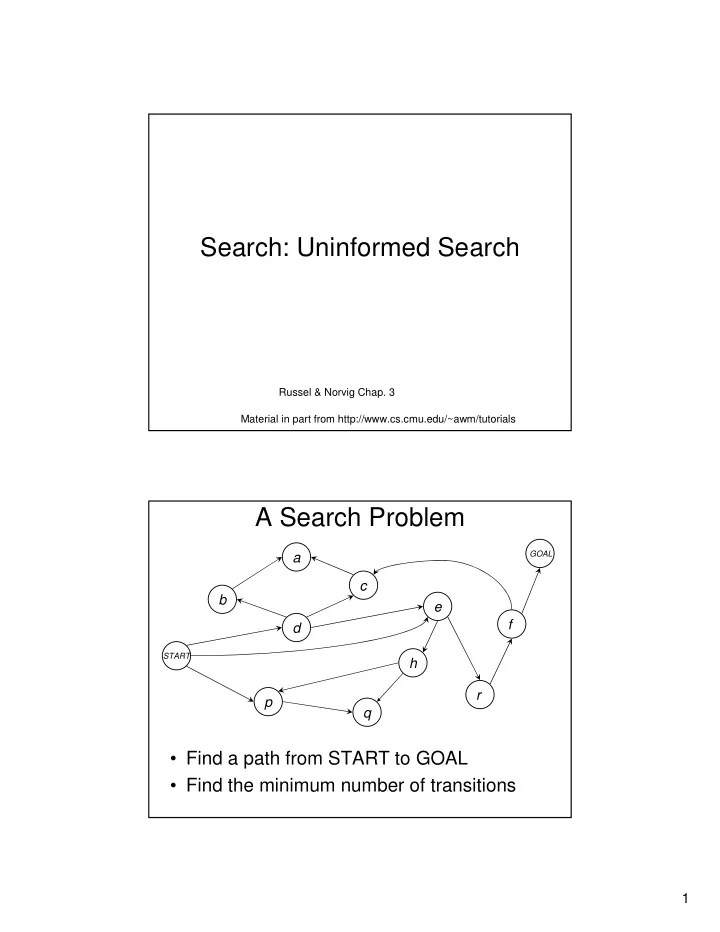
A Search Problem
- Find a path from START to GOAL
- Find the minimum number of transitions
b a d p q h e c f r
START GOAL