
SLIDE 1
1
Lecture 5: Load Balancing
2
Scheduling
- MIMD parallel program
– A number of tasks executing serially or in parallel
- The scheduling problem NP-complete problem (in general)
– Distribute tasks on processors so that minimal execution time is achieved
- Optimal distribution
– Processor allocation + execution order such that the execution time is minimized
- Scheduling system (Consumer, Policy, Resource)
Consumer Resource Scheduler Policy
3
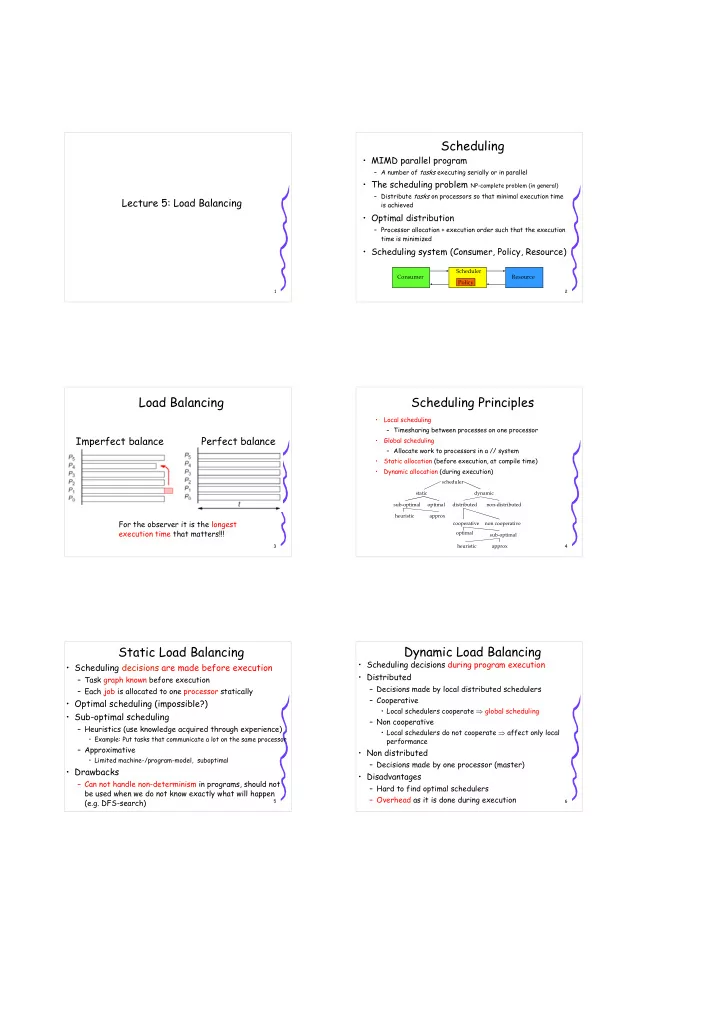
Load Balancing
Imperfect balance Perfect balance
For the observer it is the longest execution time that matters!!!
4
Scheduling Principles
- Local scheduling
– Timesharing between processes on one processor
- Global scheduling
– Allocate work to processors in a // system
- Static allocation (before execution, at compile time)
- Dynamic allocation (during execution)
scheduler static dynamic sub-optimal
- ptimal
heuristic approx distributed non-distributed cooperative non cooperative
- ptimal
sub-optimal approx heuristic 5
Static Load Balancing
- Scheduling decisions are made before execution
– Task graph known before execution – Each job is allocated to one processor statically
- Optimal scheduling (impossible?)
- Sub-optimal scheduling
– Heuristics (use knowledge acquired through experience)
- Example: Put tasks that communicate a lot on the same processor
– Approximative
- Limited machine-/program-model, suboptimal
- Drawbacks
– Can not handle non-determinism in programs, should not be used when we do not know exactly what will happen (e.g. DFS-search)
6
Dynamic Load Balancing
- Scheduling decisions during program execution
- Distributed
– Decisions made by local distributed schedulers – Cooperative
- Local schedulers cooperate ⇒ global scheduling
– Non cooperative
- Local schedulers do not cooperate ⇒ affect only local
performance
- Non distributed
– Decisions made by one processor (master)
- Disadvantages