
Laboratory for Perceptual Robotics – Department of Computer Science
Rod Grupen Department of Computer Science University of Massachusetts Amherst
Roger-the-Crab
Laboratory for Perceptual Robotics – Department of Computer Science 2
Un-Crating Roger - C and X windows
Platforms:
- OS X, Linux, Windows (Cygwin ||dual-boot/VM Linux)
Getting Started:
- download your copy of the Roger simulator from
www-robotics.cs.umass.edu/~grupen/603/code/roger-2020.tar
- unpack the compressed directory
tar -xvf roger-2020.tar
- make the simulator and your projects (as in README)
- cd roger-2020/RogerSimulator
> make clean; make <CR> >cd roger-2020/RogerClient > make clean; make <CR> > cd ../RogerProjects > make clean; make <CR>
- run the simulator (e.g. from README)
>“./RogerSimulator/simulator 1 1 <CR>” > “./RogerProjects/roger 127.0.0.1 8000<CR>”
Laboratory for Perceptual Robotics – Department of Computer Science 3
The Simulator Environment
Laboratory for Perceptual Robotics – Department of Computer Science 4
The Simulator Environment
Laboratory for Perceptual Robotics – Department of Computer Science 5
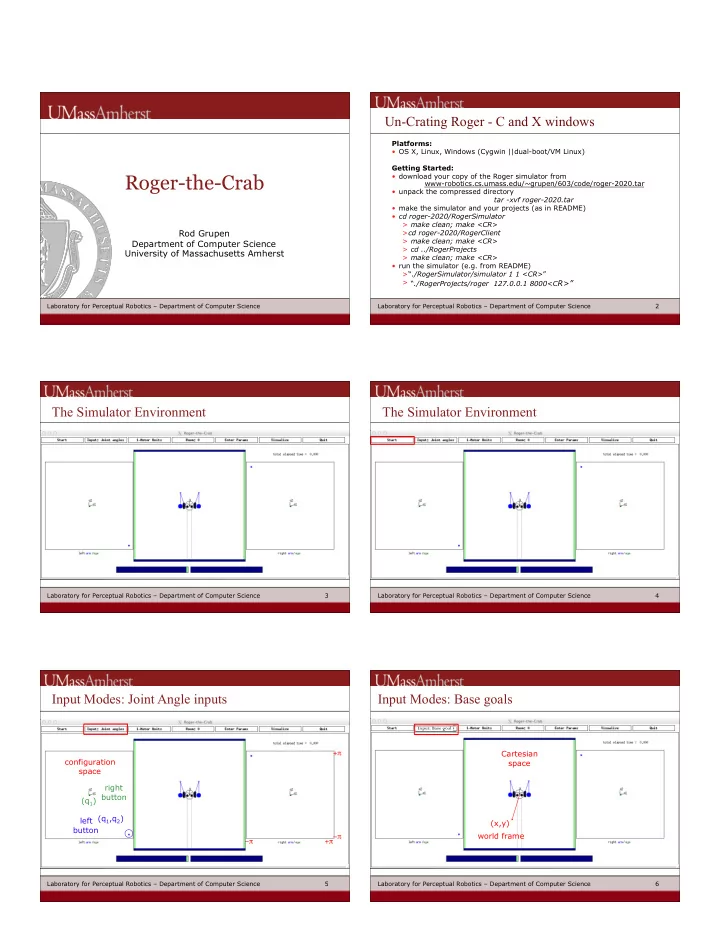
configuration space left button (q1,q2) (q1) right button −π +π +π −π
Input Modes: Joint Angle inputs
Laboratory for Perceptual Robotics – Department of Computer Science 6
Input Modes: Base goals
Cartesian space (x,y) world frame
Input: Base goal