
SLIDE 1
cse457-07-hierarchical 1
Hierarchical Modeling
cse457-07-hierarchical 2
Reading
Required: Angel, sections 9.1 – 9.6, 9.8 Optional: OpenGL Programming Guide, the Red Book, chapter 3
cse457-07-hierarchical 3
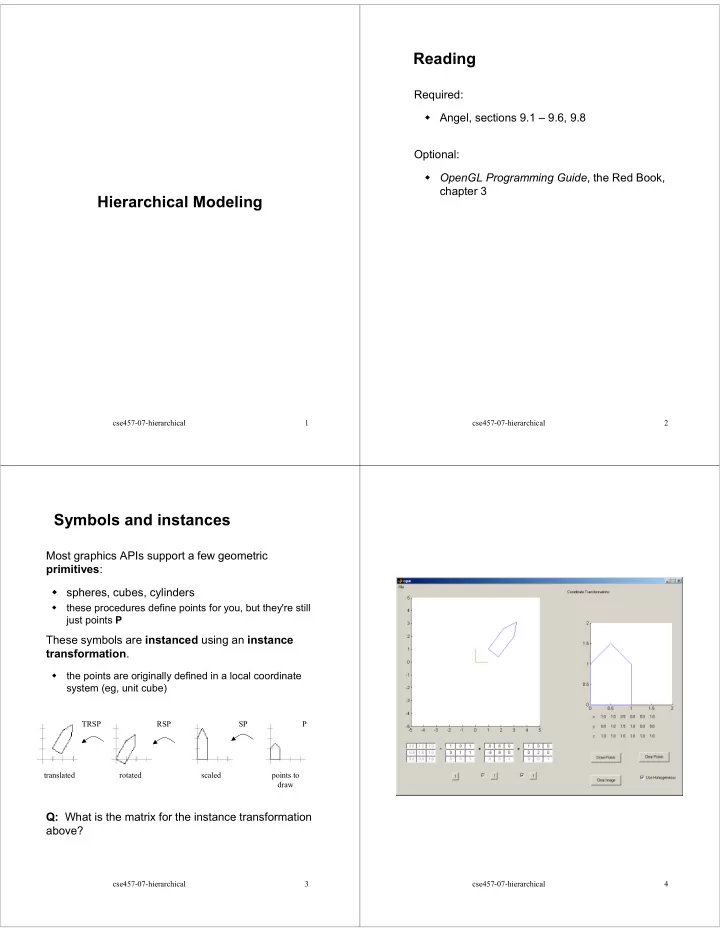
Most graphics APIs support a few geometric primitives: spheres, cubes, cylinders
- these procedures define points for you, but they're still
just points P
These symbols are instanced using an instance transformation.
- the points are originally defined in a local coordinate