
SLIDE 1
1
Processes
- What are they? How do we represent
them?
- Scheduling
- Something smaller than a process?
Threads
- Synchronizing and Communicating
- Classic IPC problems
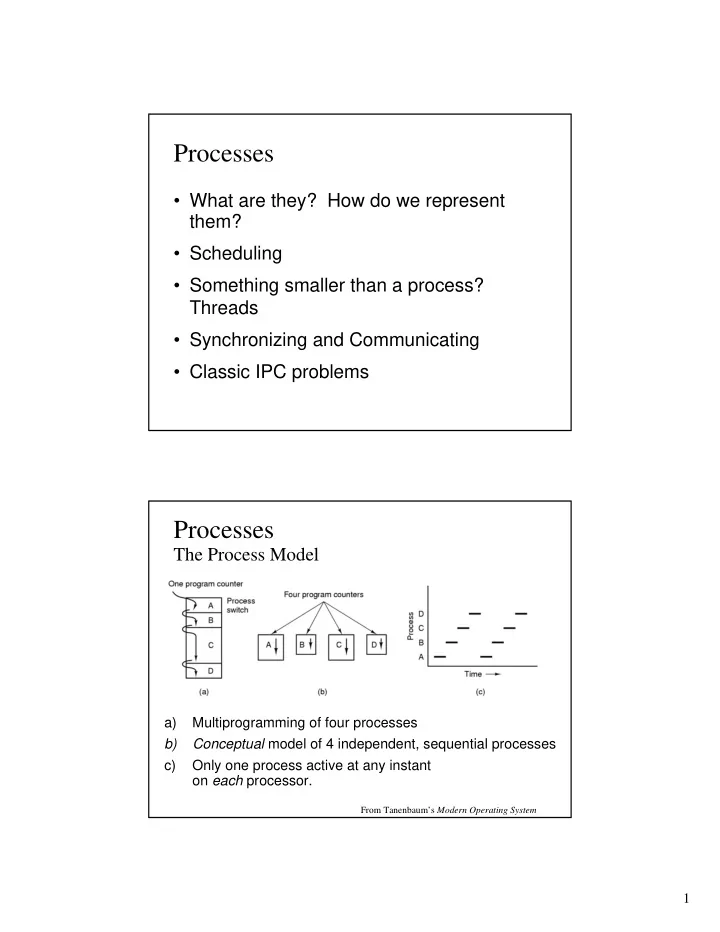
Processes
The Process Model
a) Multiprogramming of four processes b) Conceptual model of 4 independent, sequential processes c) Only one process active at any instant
- n each processor.
From Tanenbaum’s Modern Operating System