
SLIDE 1
1
Lect ure 11
J une 7, 2005 CS 486/ 686
CS486/686 Lecture Slides (c) 2005 C. Boutilier, P. Poupart & K. Larson
2
Out line
- Decision Net works
– Aka I nf luence diagr ams
- Value of inf ormat ion
- Russell and Norvig: Sect 16.5-16.6
CS486/686 Lecture Slides (c) 2005 C. Boutilier, P. Poupart & K. Larson
3
Decision Net works
- Decision net wor ks (also known as
inf luence diagr ams) provide a way of represent ing sequent ial decision problems
– basic idea: represent t he variables in t he problem as you would in a BN – add decision variables – variables t hat you “cont r ol” – add ut ilit y variables – how good dif f erent st at es are
CS486/686 Lecture Slides (c) 2005 C. Boutilier, P. Poupart & K. Larson
4
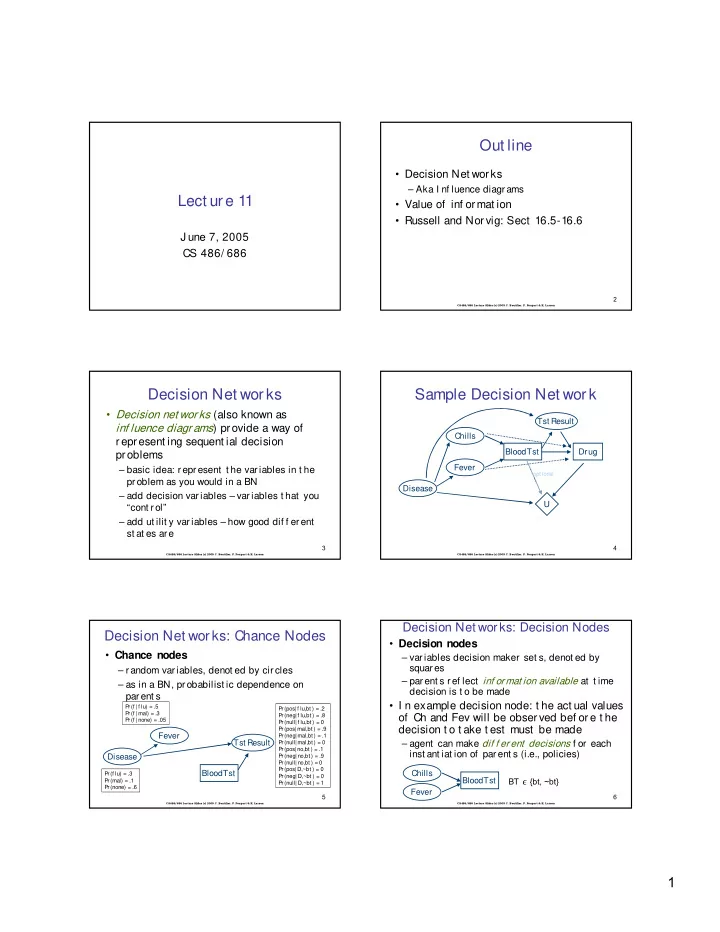
Sample Decision Net work
Disease Tst Result Chills Fever BloodTst Drug U
- pt ional
CS486/686 Lecture Slides (c) 2005 C. Boutilier, P. Poupart & K. Larson
5
Decision Net wor ks: Chance Nodes
- Chance nodes
– random var iables, denot ed by circles – as in a BN, probabilist ic dependence on parent s
Disease Fever
Pr(f lu) = .3 Pr(mal) = .1 Pr(none) = .6 Pr(f | f lu) = .5 Pr(f | mal) = .3 Pr(f | none) = .05
Tst Result BloodTst
Pr(pos| f lu,bt ) = .2 Pr(neg| f lu,bt ) = .8 Pr(null| f lu,bt ) = 0 Pr(pos| mal,bt ) = .9 Pr(neg| mal,bt ) = .1 Pr(null| mal,bt ) = 0 Pr(pos| no,bt ) = .1 Pr(neg| no,bt ) = .9 Pr(null| no,bt ) = 0 Pr(pos|D,~bt ) = 0 Pr(neg| D,~bt ) = 0 Pr(null| D,~bt ) = 1
CS486/686 Lecture Slides (c) 2005 C. Boutilier, P. Poupart & K. Larson
6
Decision Net works: Decision Nodes
- Decision nodes
– variables decision maker set s, denot ed by squares – parent s ref lect inf ormat ion available at t ime decision is t o be made
- I n example decision node: t he act ual values
- f Ch and Fev will be observed bef ore t he