
SLIDE 1
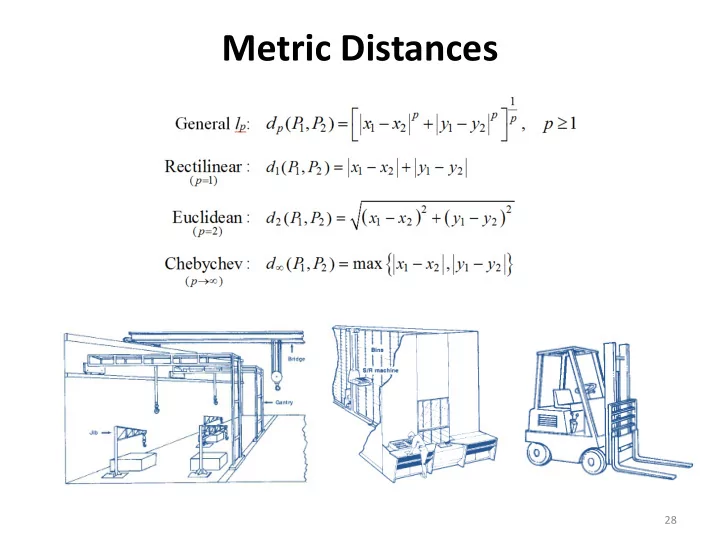
Metric Distances
28
Metric Distances 28 Great Circle Distances North Pole (90N lat) - - PowerPoint PPT Presentation
Metric Distances 28 Great Circle Distances North Pole (90N lat) North Pole C Prime (Meridian) Meridian b a International Dateline (180 lon) Latitude ( y ) Longitude ( x ) (Parallel) ( lon , lat ) = ( x , y ) A ( x 1 , y 1 ) =
28
W
0º Equator (0º lat) Greenwich (Prime) Meridian (0º lon)
N S E
North Pole (90ºN lat) South Pole (90ºS lat) International Dateline (180º lon) Latitude (y) Longitude (x) (lon, lat) = (x, y) = (140ºW, 24ºN) = (–140º, 24º)
(Meridian) (Parallel)
13.35 mi
R
(x2,y2) (x1,y1) B C A a c b North Pole Prime
l
2
= x
2
l
1
= x
1
lat2 = y2 l a t
1
= y
1
Equator Meridian
29
30
road road 1 2 1 2
: , where usually 1.15 1.5 ( , ), estimated road distance from to
i i
GC GC
d Circuity Factor g g d d g d P P P P
2 2 1 1,1 2 1,2 1 2 2 2 1 2,1 2 2,2 3 2 2 1 3,1 2 3,2
1 1 2 3 , 7 1 4 5 x p x p d d x p x p d x p x p x P d
31
2 2 1 ,1 2 ,2 3 1 * * *
1 1 7 1 4 5 ( ) ( ) ( ) x arg min ( ) ( )
i i i i i
d x p x p TD d TD TD TD
x
P x x x x x
32
120°
Fermat’s Problem (1629):
Given three points, find fourth (Steiner point) such that sum to others is minimized (Solution: Optimal location corresponds to all angles = 120°)
(quasi-Newton, fminunc)
Mead, fminsearch)
1 * * *
number of EFs ( ) ( ) arg min ( ) ( )
m i i i
m TC w d TC TC TC
x
x x x x x
Varignon Frame
1
m j i i
33
34