
SLIDE 1
Matthew Dirks Klas Nilsson Martin Hgele J. Norberto Pires Of book - - PowerPoint PPT Presentation
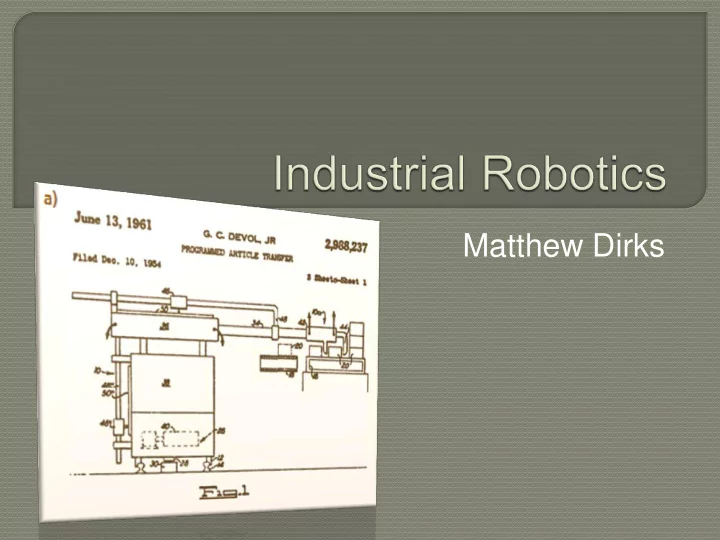
Matthew Dirks Klas Nilsson Martin Hgele J. Norberto Pires Of book chapter Industrial Robotics, Springer, 2008 IR Visual and visual tracking CCD Cameras Laser triangulation principle Force-torque sensors Wrist force