
SLIDE 1
Linear filtering Motivation: Image denoising How can we reduce - - PowerPoint PPT Presentation
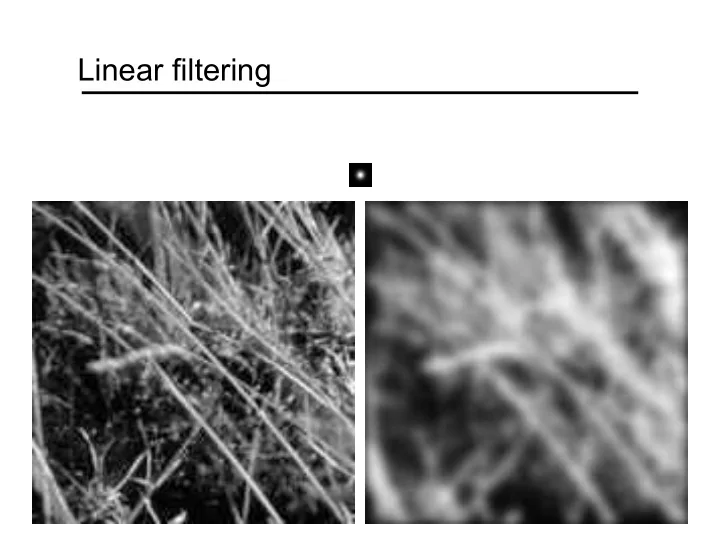
Linear filtering Motivation: Image denoising How can we reduce noise in a photograph? Moving average Lets replace each pixel with a weighted average of its neighborhood The weights are called the filter kernel What are the
1 1 1 1 1 1 1 1 1 “box filter”
Source: D. Lowe
l k
,
Source: F. Durand
Convention: kernel is “flipped”
f g g g g f g g g g f g g g g full same valid
– clip filter (black) – wrap around – copy edge – reflect across edge
Source: S. Marschner
– clip filter (black): imfilter(f, g, 0) – wrap around: imfilter(f, g, ‘circular’) – copy edge: imfilter(f, g, ‘replicate’) – reflect across edge: imfilter(f, g, ‘symmetric’)
Source: S. Marschner
1 Original
Source: D. Lowe
1 Original Filtered (no change)
Source: D. Lowe
1 Original
Source: D. Lowe
1 Original Shifted left By 1 pixel
Source: D. Lowe
Original
1 1 1 1 1 1 1 1 1
Source: D. Lowe
Original 1 1 1 1 1 1 1 1 1 Blur (with a box filter)
Source: D. Lowe
Original 1 1 1 1 1 1 1 1 1 2
(Note that filter sums to 1)
Source: D. Lowe
Original 1 1 1 1 1 1 1 1 1 2
with local average
Source: D. Lowe
Source: D. Lowe
smoothed (5x5)
–
detail
=
sharpened
=
detail
+
Source: D. Forsyth
neighborhood pixels according to their closeness to the center “fuzzy blob”
ignored when computing the filter values, as we should renormalize weights to sum to 1 in any case)
0.003 0.013 0.022 0.013 0.003 0.013 0.059 0.097 0.059 0.013 0.022 0.097 0.159 0.097 0.022 0.013 0.059 0.097 0.059 0.013 0.003 0.013 0.022 0.013 0.003
5 x 5, σ = 1
Source: C. Rasmussen
Source: K. Grauman
σ = 2 with 30 x 30 kernel σ = 5 with 30 x 30 kernel
Source: K. Grauman
result as larger-σ kernel would have
is same as convolving once with kernel with std. dev.
Source: K. Grauman
2 σ
[ ]
1 2 1 1 2 1 1 2 1 2 4 2 1 2 1 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡
Source: D. Lowe
Source: S. Seitz
Source: M. Hebert
Smoothing with larger standard deviations suppresses noise, but also blurs the image
3x3 5x5 7x7
Source: K. Grauman
Source: K. Grauman
Salt-and-pepper noise Median filtered
Source: M. Hebert
3x3 5x5 7x7 Gaussian Median
Source: D. Lowe
smoothed (5x5)
–
detail
=
sharpened
=
detail
+ α
Gaussian unit impulse Laplacian of Gaussian
) ) 1 (( ) 1 ( ) ( g e f g f f g f f f − + ∗ = ∗ − + = ∗ − + α α α α
image blurred image unit impulse (identity)
Gaussian Filter Laplacian Filter