
SLIDE 1
LFEV - High Level Simplified Block Diagram Work Breakdown Structure - - PowerPoint PPT Presentation
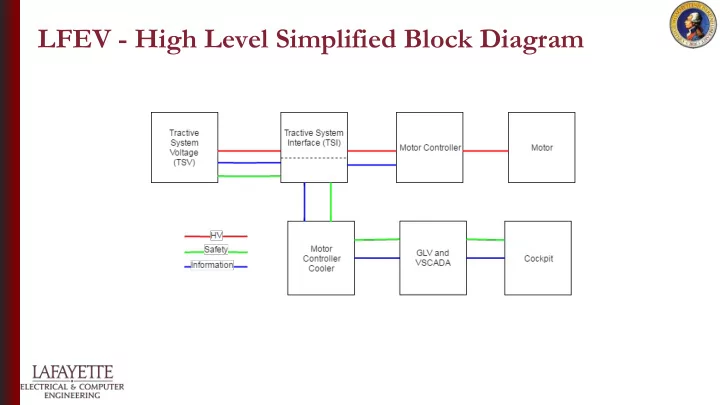
LFEV - High Level Simplified Block Diagram Work Breakdown Structure WBS Schedule PSL Interconnect / Cabling Complete Interconnection of all car subsystems Identifying and acquiring/purchasing all required parts for complete